Über den Beitrag
Nachdem ich in meinem letzten Beitrag über das Echtzeituhrmodul DS3231 berichtet habe, passt nun ein Folgebeitrag über DCF77 Funkuhren thematisch sehr gut.
Auf die folgenden Punkte gehe ich ein:
- Was ist der DCF77 Zeitzeichensender?
- Decodierung des DCF77 Signals.
- DCF77 Empfängermodule
- Erfassung und Auswertung des DCF77 Signals mit dem Arduino.
- Den DCF77 Empfänger komfortabel mit der RTCLib nutzen.
Der DCF77 Zeitzeichensender
Der DCF77 ist ein sogenannter Zeitzeichensender, welcher das aktuelle Datum und die Uhrzeit in digitaler Form auf der Langwellenfrequenz 77.5 kHz verbreitet. Die Uhrzeit ist dabei die MEZ (Mitteleuropäische Zeit) beziehungsweise die MESZ (Mitteleuropäische Sommerzeit).
Der DCF77 Sender steht in Mainflingen in Hessen. Hier könnt ihr ihn auf Google Maps bewundern. Er hat eine Reichweite von ca. 2000 km und steuert einen großen Teil der Funkuhren in Westeuropa. Andere Teile der Welt haben Zeitzeichensender, die auf anderen Frequenzen senden und auch anders kodiert sind.
DCF77 steht für:
- D: Deutschland
- C: Kürzel für Langwelle
- F: für die Nähe zu Frankfurt
- 77: Übertragungsfrequenz
Mehr Informationen über den DCF77 Sender und seine Geschichte findet ihr hier.
Wie das DCF77 Signal aufgebaut ist
Die Informationen werden übertragen, indem das Funksignal einmal pro Sekunde für entweder 100 oder 200 Millisekunden auf 25 Prozent abgesenkt wird. Eine Absenkung für 100 Millisekunden bedeutet eine „0“, 200 Millisekunden bedeutet eine „1“. Eine Sequenz beträgt eine Minute. Damit würden 60 Bit übertragen, allerdings wird das letzte Bit weggelassen, um die Sequenzen eindeutig voneinander zu trennen.
Die meisten DCF77 Empfängermodule sind so aufgebaut, dass sie während der Absenkung ein HIGH-Signal liefern, ansonsten ist es LOW. Damit erhaltet ihr Sequenzen, die folgendermaßen aussehen:
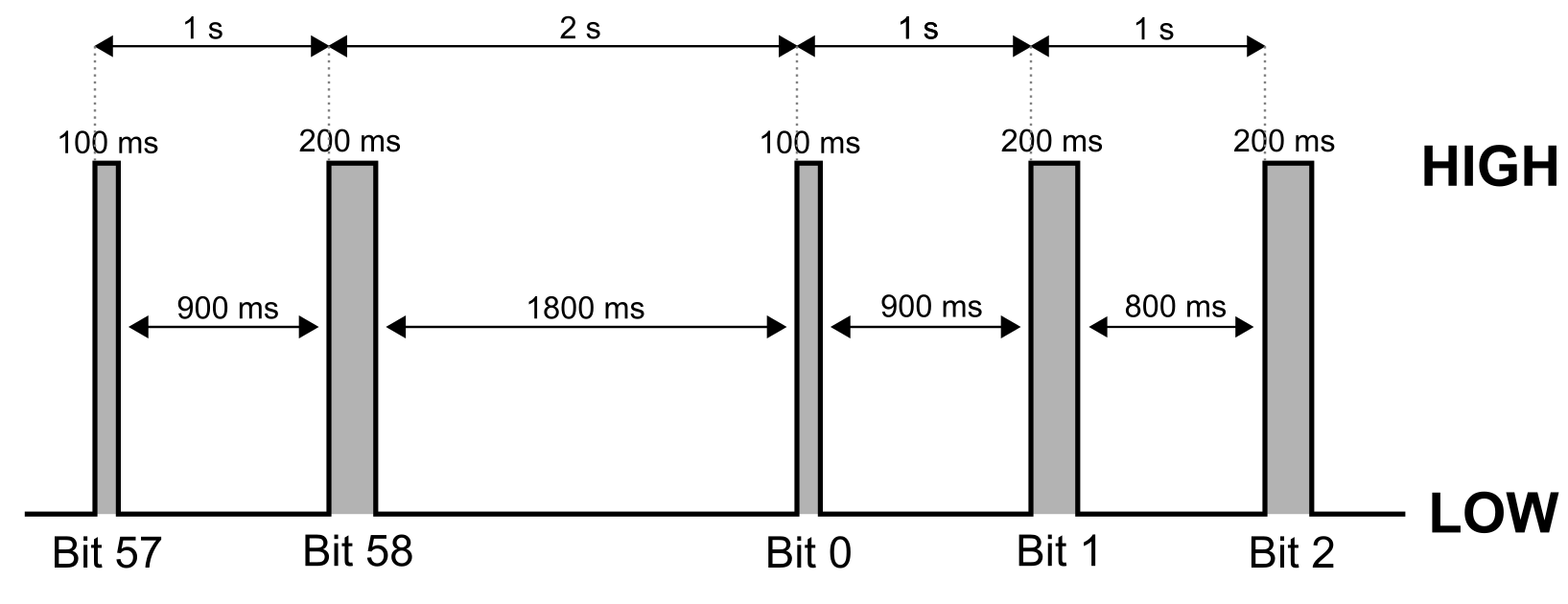
Habt ihr ein Modul, dass andersherum arbeitet, müsst ihr umdenken und die Beispielsketche entsprechend ändern.
Decodierung des DCF77 Signals
Bestimmte Bits beziehungsweise bestimmte Abschnitte sind für einen bestimmten Teil der zu übermittelnden Informationen reserviert:
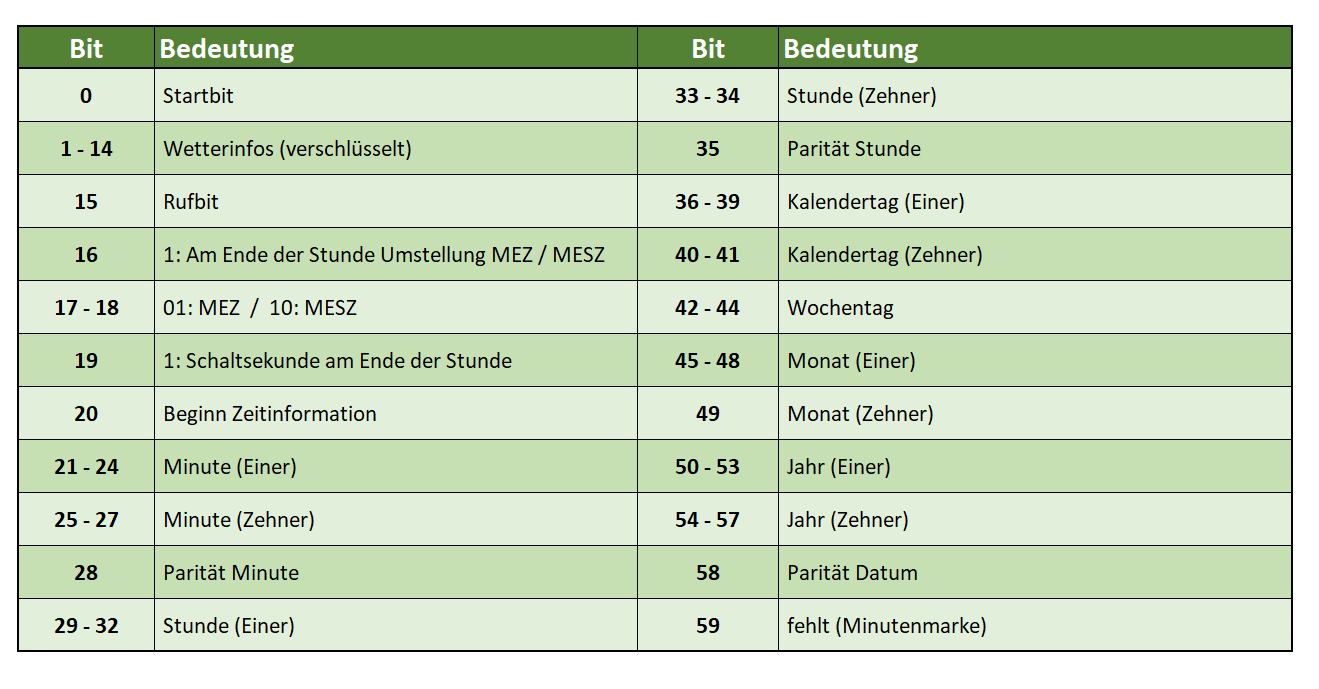
- Um die Wetterinformationen lesen zu können, müsstet ihr eine Lizenz erwerben.
- Die eigentliche Übertragung der Uhrzeit und des Datums beginnt nach Bit 20. Alles davor betrachte ich nicht.
- Bei zweistelligen Zahlen werden die „Einer“ und die „Zehner“ getrennt übertragen, jede Ziffer für sich aber im Zweiersystem – eine etwas eigentümliche Mischung von Binär- und Dezimalsystem.
- Die Zeitangaben beziehen sich auf den Zeitpunkt, wenn das nächste Startbit gesendet wird.
Mit den Paritätsbits lassen sich die übertragenen Daten auf Richtigkeit prüfen. Die Überprüfung erfolgt auf gerade Parität. Am besten erkläre ich das an einem Beispiel. Die Minuten werden in den Bits 21 bis 27 übertragen, also 7 Nullen oder Einsen. Alle Einsen werden zusammengezählt. Ist das Ergebnis eine ungerade Zahl, dann ist das Paritätsbit eine 1. Ist das Ergebnis hingegen eine gerade Zahl, ist das Paritätsbit 0. Genauso wird mit den Stunden (Bits 29-34) und dem Datum (Bits 40-57) verfahren. Anders ausgedrückt: Die Parität des Paritätsbits entspricht der Parität der zu prüfenden Bitfolge.
Sind alle Paritäten OK und habt ihr 59 Bits in einer Sequenz erhalten, könnt ihr euch recht sicher sein, dass die Datenübertragung korrekt war.
Hier könnt ihr live verfolgen, was der DCF77 Sender gerade überträgt.
DCF77 Empfängermodule
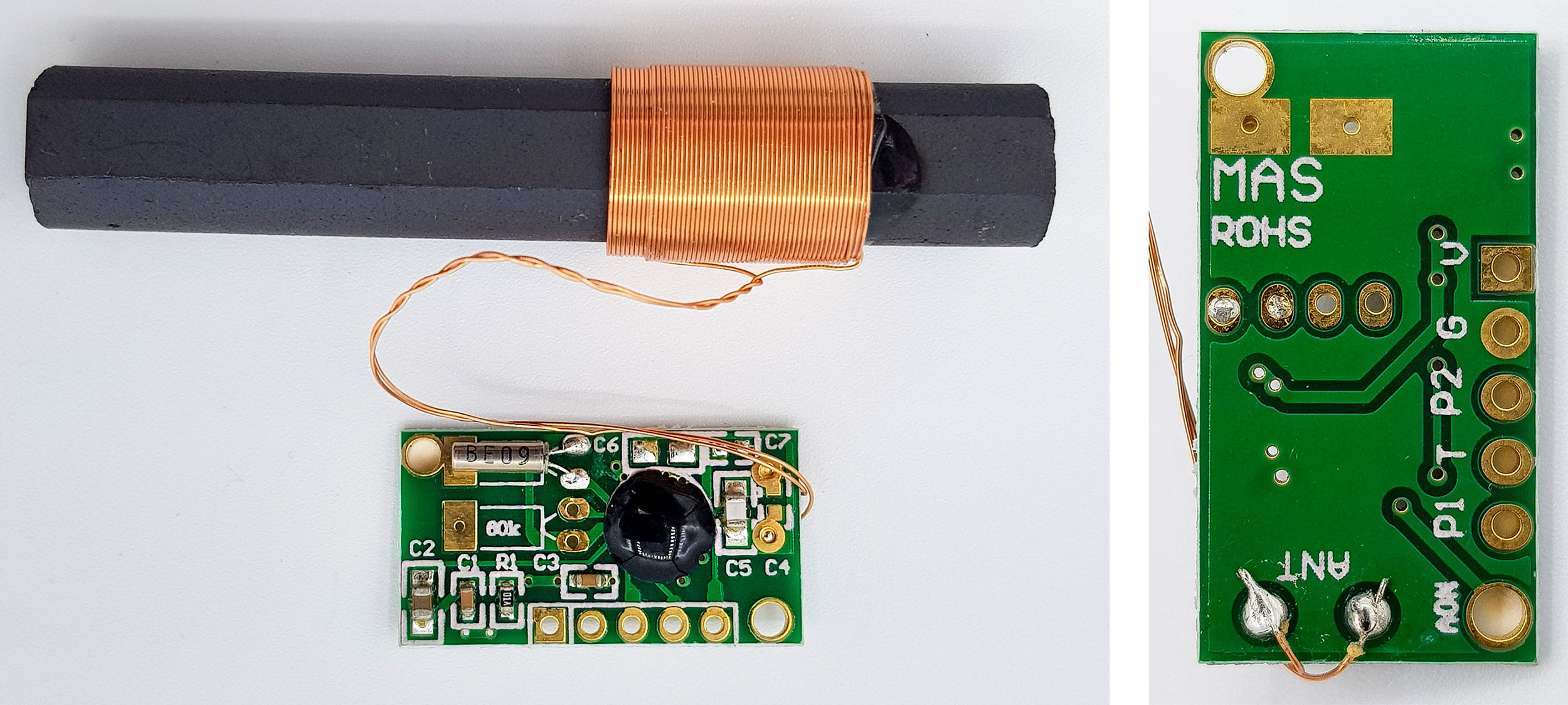
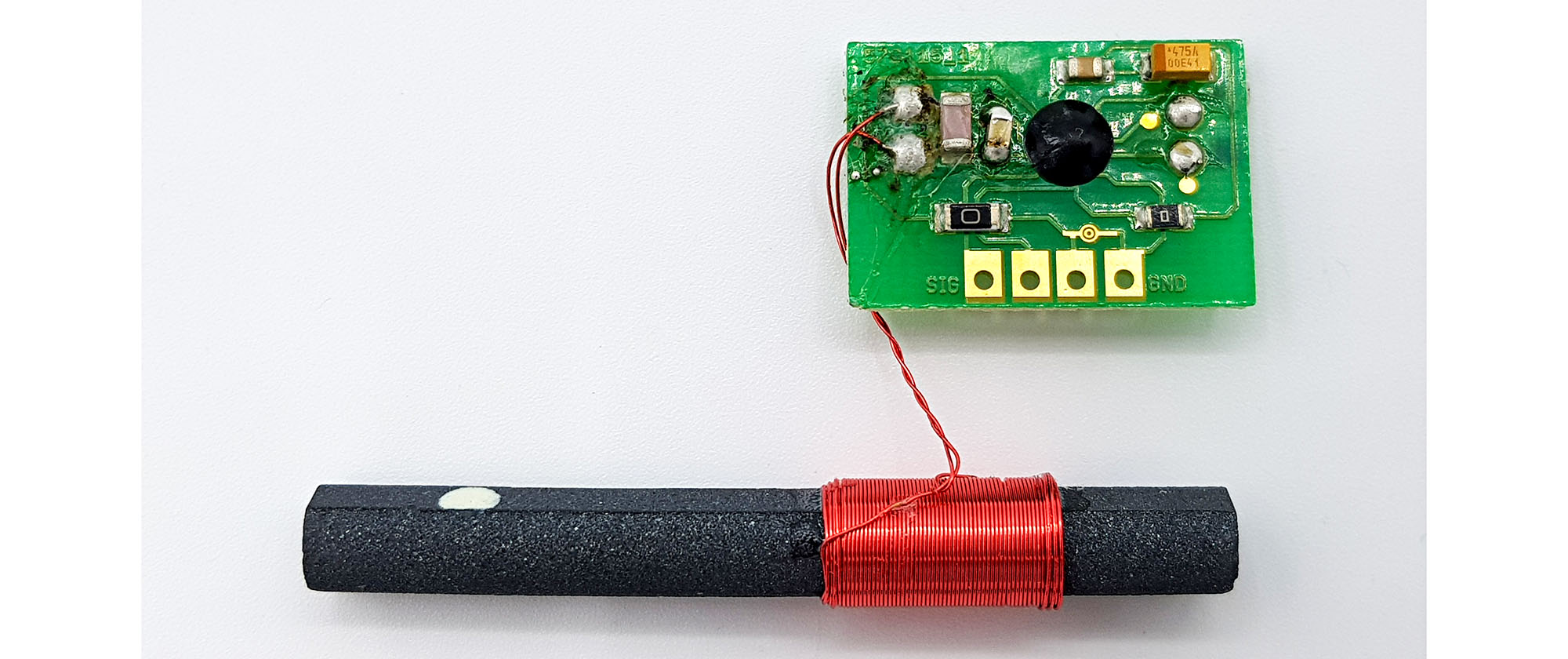
Ein Modul mit Antenne erhaltet ihr für 5 bis 15 Euro in Online-Shops. Für das hier abgebildete Modell habe ich 11 Euro bezahlt und bin mit seiner Empfangsqualität ganz zufrieden:
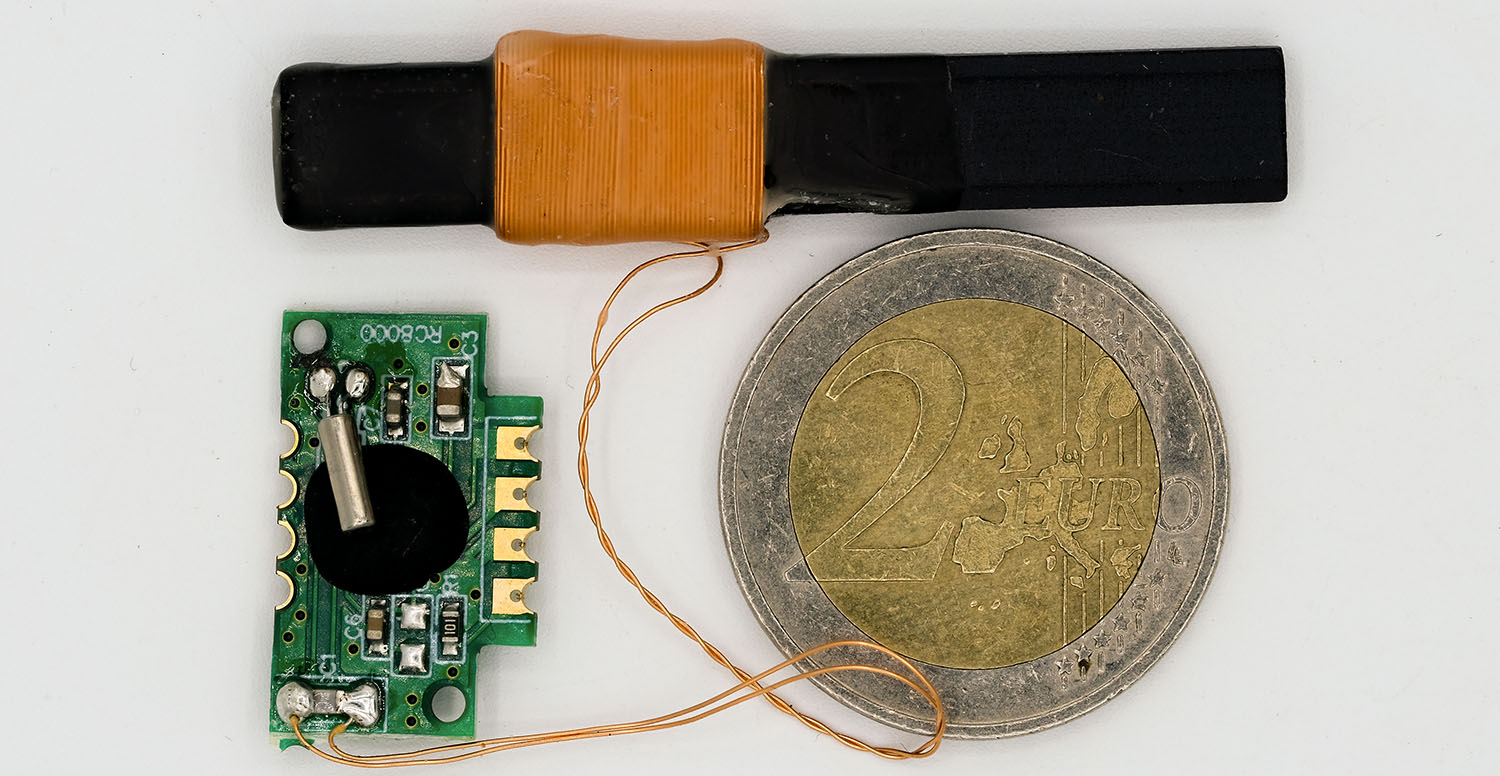
Dieses Modell hier kostete nur die Hälfte und ist deutlich kleiner:
Es gab dazu keine Dokumentation (nicht mal bezüglich der Versorgungsspannung!), außerdem habe ich damit unter gleichen Bedingungen deutlich mehr Fehlmessungen als mit dem anderen Modul erhalten. Es gibt hier also deutliche Qualitätsunterschiede.
Fehlmessungen sind aber nicht nur eine Frage der Modulqualität, sondern auch die Ausrichtung der Antenne, das Wetter, der Standort (Geologie) und weitere Faktoren können den Empfang beeinflussen. Ein paar Fehlmessungen sind aber auch nicht schlimm, solange ihr sie identifiziert und euer Code nicht darauf angewiesen ist, jede Minute einen validen Datensatz zu erhalten. Wenn ihr zu viele Fehlmessungen feststellt, dann versucht erst einmal die Antenne anders zu positionieren. Was bei einigen Modulen auch helfen kann, ist Batteriebetrieb.
„RC8000“ – Module
Dann gibt es noch die Module DCF-1060N-800 und DCF-3850M-800, deren Platine mit „RC8000“ gekennzeichnet ist. Damit habe ich ausgesprochen gute Erfahrungen gemacht, insbesondere mit dem DCF-3850M-800, das sich zudem durch eine kleine Antenne auszeichnet. Es gab kaum Fehlmessungen, und zwar unabhängig von der Positionierung der Antenne. Das DCF-1060N-800 hat nach Verkäuferangaben eine etwas größere Empfindlichkeit, was ich aber nicht bestätigen kann. Das DCF-3850M-800-Module findet sich in vielen Funkweckern (danke, Claus!).
Wenn ihr euch ein Modul besorgen wollt, dann schaut am besten erst mal, ob es ein Datenblatt oder zumindest grundlegende technische Daten dazu gibt. Einige Vertreter können anscheinend nur bis zu 3.3 V, andere bis 5 V oder noch mehr vertragen. Für den Stromverbrauch habe ich übereinstimmende Angaben von < 100 Mikroampere gefunden.
Das Canaduino Board
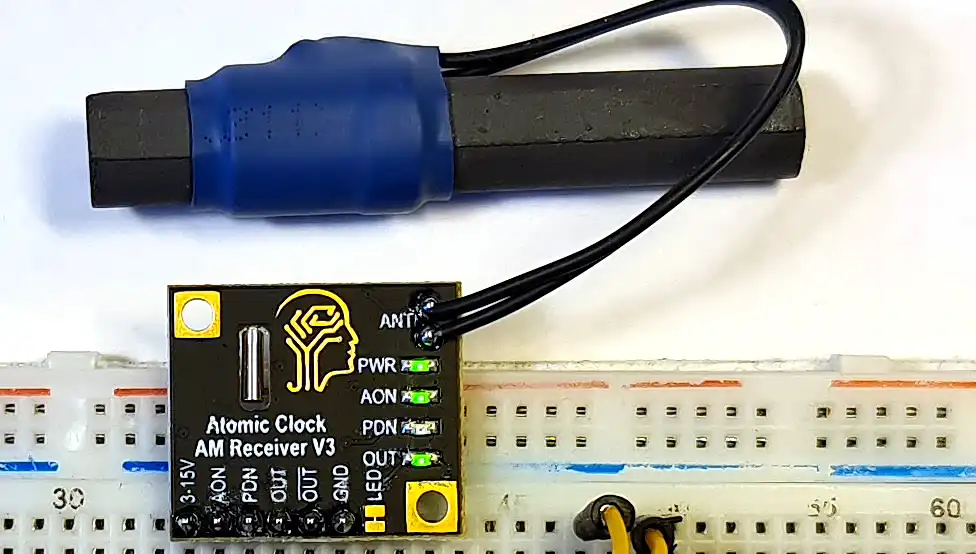
Das nach meiner Erfahrung mit technisch beste Modul ist das oben abgebildete Modell von Canaduino (den „Größen-Preis“ gewinnt allerdings das DCF-3850M-800/RC8000-Modul). Dafür habe ich 20 Euro einschließlich der Versandgebühren aus Kanada bezahlt. Ihr könnt es mit 3 -15 Volt betreiben, es besitzt eine automatische Verstärkung und hat einen regulären und einen invertierten Ausgang. Die Qualität der Signale war hervorragend, auch an Orten, wo andere Module Schwierigkeiten hatten. Ein kurzes Manual zu dem Modul gibt es hier.
Beachtet insbesondere die Ausrichtung der Antenne relativ zum Modul. Für eine schnelle Erfassung des Signals verbindet PDN mit einem Pin eures Mikrocontroller-Boards und schaltet diesen in setup() auf Output / LOW.
Das DCF77 Signal empfangen und auswerten
Schaltung
Wie schon erwähnt, variieren die Module in ihrer Ausführung. Für das oben abgebildete Modul habe ich die folgende Schaltung verwendet:

- Die LED ist an sich nicht essenziell, ich nutze sie für einige Beispielsketche.
- Mit dem Enable Pin lässt sich das Modul an- und ausschalten (das hat nicht jedes Modul).
- Der Datenausgang muss für die meisten meiner Sketche an einem Interrupt Pin hängen.
Ein einfacher Funktionstest
Wenn ihr einfach prüfen wollt, ob euer Modul prinzipiell Daten empfängt, dann könnt ihr diesen Sketch verwenden:
int interruptPin=2;
int ledPin=7;
void setup(){
pinMode(ledPin, OUTPUT);
pinMode(interruptPin, INPUT);
attachInterrupt(digitalPinToInterrupt(interruptPin), DCF77_ISR, CHANGE);
}
void loop(){
}
void DCF77_ISR(){
if(digitalRead(interruptPin)){
digitalWrite(ledPin, HIGH);
}
else{
digitalWrite(ledPin, LOW);
}
}
Alternativ ginge es natürlich auch ohne Interrupt, als zum Beispiel so:
int dataPin = 2;
int ledPin = 7;
void setup() {
pinMode(dataPin, INPUT);
pinMode(ledPin, OUTPUT);
}
void loop() {
if(digitalRead(dataPin)){
digitalWrite(ledPin, HIGH);
}
else{
digitalWrite(ledPin, LOW);
}
}
Die Interrupt Methode hat den Vorteil, dass die Hauptschleife leer ist, ihr also irgendetwas anderes nebenbei machen könnt. Ich werde deswegen auf der Interrupt Methode aufbauen.
Wenn der Sketch läuft, solltet ihr sehen, dass die LED im Sekundentakt blinkt. Wenn ihr genau hinschaut, werdet ihr erkennen, dass die LED mal kürzer und mal länger leuchtet. Einmal pro Minute beträgt die Pause fast zwei Sekunden. Empfangsstörungen machen sich meistens durch schnelles und unregelmäßiges Blinken bemerkbar.
Sequenzen erfassen
Mit dem nächsten Sketch messen wir die Signallängen und erfassen ganze Sequenzen. Ein paar Anmerkungen zur Signallänge:
- Nach dem Auslösen des Interrupts wird geprüft, ob der Interrupt Pin HIGH oder LOW ist. Das verrät, ob es bei der abgeschlossenen Phase um das 100/200-Millisekunden-Signal oder die Pause handelt.
- Die Signallänge wird über die
millis()Funktion ermittelt. - Alle HIGH-Signale, die kürzer als 150 Millisekunden sind, werden als „0“ interpretiert, die längeren als „1“. Bei einigen Modul-/Boardkombinationen kann der optimale Wert abweichen.
- Eine LOW-Phase von größer 1500 Millisekunden wird als Minutenmarke interpretiert.
Zur Sequenz:
- Die 59 Bits einer Sequenz passen in eine acht Byte große
uint64_tVariable (= unsigned long long auf einem AVR-Arduino), die ich currentBuf genannt habe. - Der Zähler für die Position in currentBuf ist bufCounter.
currentBuf |= ((uint64_t)1<<bufCounter);fügt eine „1“ in die Sequenz ein. Ohne die Umwandlung der „1“ inuint64_tfunktioniert es nicht. Der Weg zu dieser Erkenntnis hat mich viel Zeit gekostet.- Die
Serial.print()Funktion ist nicht mituint64_tVariablen verträglich. Über Bitoperationen teile ich die currentBuf Variable in zweiuint32_tStücke, um sie ausgeben zu können. - Die Ausgabe der Sequenz erfolgt, wenn die Minutenmarke erreicht ist.
Die Serial.print() Aufrufe nehmen bei 9600 BAUD in Summe eine Zeit im Millisekundenbereich in Anspruch (pro Sekunde). Ich habe deswegen 115200 BAUD gewählt.
Die Sequenz endet mit der langen LOW-Pause nach dem 59. HIGH-Signal (= Nr. 58). Danach kommt das Startbit der nächsten Sequenz. Diese 100 Millisekunden nutzen wir zur Auswertung und Ausgabe.
#define MIN_HIGH_SIGNAL 150 // min. high signal - test and adust
#define MIN_END_SIGNAL 1500 // min. low phase after 59th signal
int interruptPin = 2;
unsigned int bufCounter = 0;
volatile unsigned long lastInt = 0;
volatile uint64_t currentBuf = 0;
volatile bool newSignal = false;
volatile bool newSequence = false;
volatile unsigned long highDur = 0;
volatile unsigned long lowDur = 0;
void setup() {
Serial.begin(115200);
Serial.println(" HIGH / LOW");
pinMode(interruptPin, INPUT);
attachInterrupt(digitalPinToInterrupt(interruptPin), DCF77_ISR, CHANGE);
}
void loop() {
if(newSignal) {
newSignal = false;
Serial.print(bufCounter);
Serial.print(". ");
Serial.print(highDur);
Serial.print(" / ");
Serial.println(lowDur);
bufCounter++;
if (newSequence) {
uint32_t highBuf = (currentBuf>>32) & 0x7FFFFFF;
uint32_t lowBuf = (currentBuf & 0xFFFFFFFF);
newSequence = false;
newSignal = false;
bufCounter = 0;
Serial.print("Signal, upper 4 bytes: ");
Serial.println(highBuf, BIN);
Serial.print("Signal, lower 4 bytes: ");
Serial.println(lowBuf, BIN);
}
}
}
void DCF77_ISR() {
unsigned int dur = 0;
dur = millis() - lastInt;
if(digitalRead(interruptPin)){
lowDur = dur;
newSignal = true;
if(dur > MIN_END_SIGNAL) {
newSequence = true;
}
}
else{
highDur = dur;
if(dur > MIN_HIGH_SIGNAL) {
currentBuf |= ((uint64_t)1<<bufCounter);
}
}
lastInt = millis();
}
Ausgabe von dcf77_get_sequence.ino
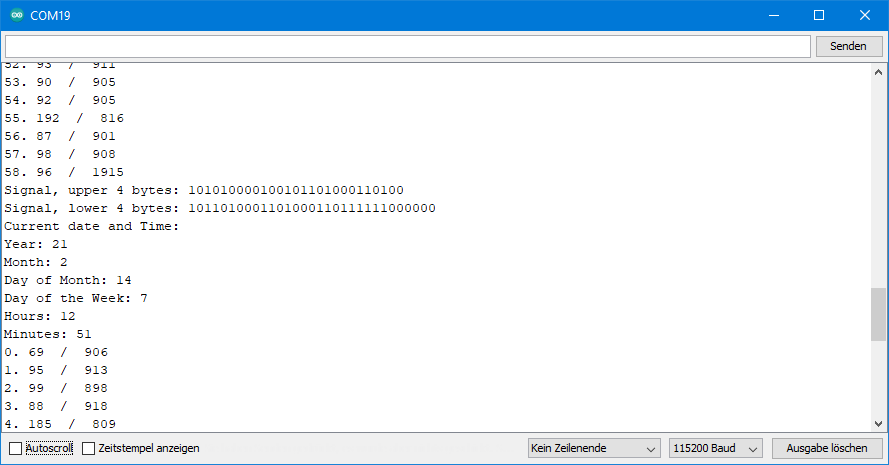
Hier seht ihr einen Ausschnitt der Ausgabe:

Die HIGH und LOW Phasen differieren ein wenig von den Ideallängen, aber Nullen und Einsen sind deutlich unterscheidbar.
Die erste aufgenommene Sequenz wird nur in 2 von 60 Fällen vollständig sein, nämlich wenn ihr in den letzten zwei Sekunden einer laufenden Sequenz einsteigt.
Die erfassten Sequenzen auswerten
Nun werten wir die empfangenen Sequenzen aus. Dazu übergibt die ISR die Sequenz currentBuf der Funktion evaluateSequence(). Diese zerhackt die Sequenz zunächst in die relevanten Abschnitte (Minute, Stunde, Wochentag, usw.).
Für die Paritätsprüfung nehme ich die Funktion parity_even_bit(). Um sie verwenden zu können, müsst ihr utils/parity.h einbinden. Diese Datei gehört zur Arduino bzw. AVR Grundausstattung, ihr müsst sie also nicht installieren. parity_even_bit() erwartet einen byte Wert als Argument. Die Funktion liefert „0“ (false) für die Parität „0“ und „1“ für die Parität „1“. Der Ausschnitt für das Datum ist größer als ein Byte, also ermittele ich die Paritäten des Kalendertages, Wochentages, Monats und Jahres einzeln. Ist die Summe der Paritäten eine gerade Zahl, dann ist die Gesamtparität „0“. Ist sie ungerade, dann ist die Parität „1“. Wenn ihr kein AVR Board (Arduino UNO, Nano, Mega, etc.) verwendet, dann bindet parity.h nicht mit ein und entkommentiert die Ersatzfunktion am Ende dieses und der folgenden Sketche.
rawByteToInt() zerlegt den Rohwert für Minute, Stunde, Tag, usw. in den Einer- und Zehnerteil und liefert die Summe als Integer zurück. Diese Werte werden dann ausgegeben.
#include <util/parity.h> //comment out if you don't use an AVR MCU
#define MIN_HIGH_SIGNAL 150
#define MIN_END_SIGNAL 1500
int interruptPin=2;
unsigned int bufCounter;
volatile unsigned long lastInterrupt = 0;
uint64_t tempBuf = 0;
volatile uint64_t currentBuf = 0;
volatile bool newSignal = false;
volatile bool newSequence = false;
volatile unsigned long highDur = 0;
volatile unsigned long lowDur = 0;
void setup() {
Serial.begin(115200);
Serial.println(" HIGH / LOW");
pinMode(interruptPin, INPUT);
attachInterrupt(digitalPinToInterrupt(interruptPin), DCF77_ISR, CHANGE);
}
void loop(){
if(newSignal) {
newSignal = false;
Serial.print(bufCounter);
Serial.print(". ");
Serial.print(highDur);
Serial.print(" / ");
Serial.println(lowDur);
bufCounter++;
if (newSequence) {
uint32_t highBuf = (currentBuf>>32) & 0x7FFFFFF;
uint32_t lowBuf = (currentBuf & 0xFFFFFFFF);
newSequence = false;
tempBuf = currentBuf;
while(digitalRead(interruptPin)) {;} // we wait for the first Low
currentBuf = 0;
bufCounter = 0;
newSignal = false;
Serial.print("Signal, upper 4 bytes: ");
Serial.println(highBuf, BIN);
Serial.print("Signal, lower 4 bytes: ");
Serial.println(lowBuf, BIN);
evaluateSequence();
}
}
}
void evaluateSequence(){
uint8_t dcf77Year = (tempBuf>>50) & 0xFF; // year = bit 50-57
uint8_t dcf77Month = (tempBuf>>45) & 0x1F; // month = bit 45-49
uint8_t dcf77DayOfWeek = (tempBuf>>42) & 0x07; // day of the week = bit 42-44
uint8_t dcf77DayOfMonth = (tempBuf>>36) & 0x3F; // day of the month = bit 36-41
uint8_t dcf77Hour = (tempBuf>>29) & 0x3F; // hour = bit 29-34
uint8_t dcf77Minute = (tempBuf>>21) & 0x7F; // minute = 21-27
bool parityBitMinute = (tempBuf>>28) & 1;
bool parityBitHour = (tempBuf>>35) & 1;
bool parityBitDate = (tempBuf>>58) & 1;
if((parity_even_bit(dcf77Minute)) != parityBitMinute){
Serial.println("Minute parity not OK");
}
if((parity_even_bit(dcf77Hour)) != parityBitHour){
Serial.println("Hour parity not OK");
}
if(((parity_even_bit(dcf77DayOfMonth) + parity_even_bit(dcf77DayOfWeek)
+ parity_even_bit(dcf77Month) + parity_even_bit(dcf77Year))%2) != parityBitDate)
{
Serial.println("Date parity not OK");
}
Serial.println("Current date and Time:");
Serial.print("Year: "); Serial.println(rawByteToInt(dcf77Year));
Serial.print("Month: "); Serial.println(rawByteToInt(dcf77Month));
Serial.print("Day of Month: "); Serial.println(rawByteToInt(dcf77DayOfMonth));
Serial.print("Day of the Week: "); Serial.println(rawByteToInt(dcf77DayOfWeek));
Serial.print("Hours: "); Serial.println(rawByteToInt(dcf77Hour));
Serial.print("Minutes: "); Serial.println(rawByteToInt(dcf77Minute));
}
unsigned int rawByteToInt(uint8_t raw){
return ((raw>>4)*10 + (raw &0x0F));
}
void DCF77_ISR(){
unsigned int dur = 0;
dur = millis() - lastInterrupt;
lastInterrupt = millis();
if(digitalRead(interruptPin)){
lowDur = dur;
newSignal = true;
if(dur > MIN_END_SIGNAL) {
newSequence = true;
}
}
else{
highDur = dur;
if(dur > MIN_HIGH_SIGNAL){
currentBuf |= ((uint64_t)1<<bufCounter);
}
}
}
//uncomment the following lines if you don't use an AVR MCU
//bool parity_even_bit(uint8_t val){
// val ^= val >> 4;
// val ^= val >> 2;
// val ^= val >> 1;
// val &= 0x01;
// return val;
//}
Ausgabe von dcf77_sequence_evaluation.ino
Es ist also Sonntag, der 14. Februar, 2021, 12:59. Es funktioniert, allerdings lässt die Formatierung noch zu wünschen übrig.
Wochen- und Monatsnamen ließen sich zum Beispiel so einfügen:
char dayName[7][12] = {"Sunday", "Monday", "Tuesday", "Wednesday", "Thursday", "Friday", "Saturday"};
Serial.print(dayName[dcf77DayOfWeek]);
Ich gehe aber gleich einen anderen, deutlich bequemeren Weg.
Den DCF77 mit der RTCLib nutzen
Die RTCLib hatte ich im letzten Beitrag als Bibliothek für das DS3231 Echtzeituhr Modul vorgestellt. Über diese Aufgabe hinaus ermöglicht die RTCLib aber auch (unter anderem):
- vielfältige Formatierungsoptionen für Datum und Uhrzeit
- Rechnen mit Datum/Uhrzeit und Zeitspannen
- Softwaresimulation einer Echtzeituhr (SoftRTC)
Das hatte ich alles in meinem letzten Beitrag vorgestellt. Wenn ihr den nächsten Sketch nicht verstehen solltet, dann geht am besten noch mal dorthin zurück.
Ihr könnt die RTCLib über die Arduino IDE oder hier direkt von GitHub herunterladen.
Wir nutzen SoftRTC und stellen diese „Softwareuhr“ regelmäßig mit dem DCF77 Empfänger. In der Zeit dazwischen läuft die Uhr basierend auf millis().
Genauso gut könnt ihr den DCF77 Empfänger dazu nehmen, ein DS3231 Modul regelmäßig zu stellen.
DCF77 und SoftRTC – der Sketch
Ich habe den im letzten Sketch verwendeten Code von allen verzichtbaren Serial.print() Ausgaben befreit. Dann habe ich ihn mit dem Beispielsketch softrtc.ino der RTCLib vereinigt und etwas angepasst.
Die Uhr wird zunächst auf den 1.1.2000, 00:00 Uhr gestellt. Man könnte auch die Systemzeit des Computers übernehmen, aber ich wollte ein offensichtlich falsches Startdatum, damit deutlicher wird, wenn die Uhr durch das DCF77 Modul gestellt wird.
Die Uhr wird nur gestellt, wenn ein gültiger Datensatz vorliegt, d.h. wenn 59 Bits übermittelt wurden und die drei Paritätsbits stimmen.
#include <util/parity.h> //comment out if you don't use an AVR MCU
#include "RTClib.h"
#define MIN_HIGH_SIGNAL 150
#define MIN_END_SIGNAL 1500
int interruptPin = 2;
volatile unsigned long lastInterrupt = 0;
volatile uint64_t currentBuf = 0;
volatile unsigned int bufCounter;
RTC_Millis rtc;
void setup() {
rtc.adjust(DateTime(2000, 1, 1, 0, 0, 0));
Serial.begin(115200);
pinMode(interruptPin, INPUT);
attachInterrupt(digitalPinToInterrupt(interruptPin), DCF77_ISR, CHANGE);
}
void loop(){
static DateTime now = rtc.now();
now = rtc.now();
char buf1[] = "Today is DDD, MMM DD YYYY";
Serial.println(now.toString(buf1));
char buf2[] = "Current time is hh:mm:ss";
Serial.println(now.toString(buf2));
Serial.println();
delay(3000);
}
void DCF77_ISR() {
unsigned int dur = 0;
dur = millis() - lastInterrupt;
lastInterrupt = millis();
if(digitalRead(interruptPin)) {
if(dur > MIN_END_SIGNAL) {
if(bufCounter==59) {
evaluateSequence();
}
bufCounter = 0;
currentBuf = 0;
}
}
else{
if(dur > MIN_HIGH_SIGNAL) {
currentBuf |= ((uint64_t)1<<bufCounter);
}
bufCounter++;
}
}
void evaluateSequence(){
uint8_t dcf77Year = (currentBuf>>50) & 0xFF; // year = bit 50-57
uint8_t dcf77Month = (currentBuf>>45) & 0x1F; // month = bit 45-49
uint8_t dcf77DayOfWeek = (currentBuf>>42) & 0x07; // day of the week = bit 42-44
uint8_t dcf77DayOfMonth = (currentBuf>>36) & 0x3F; // day of the month = bit 36-41
uint8_t dcf77Hour = (currentBuf>>29) & 0x3F; // hour = bit 29-34
uint8_t dcf77Minute = (currentBuf>>21) & 0x7F; // minute = 21-27
bool parityBitMinute = (currentBuf>>28) & 1;
bool parityBitHour = (currentBuf>>35) & 1;
bool parityBitDate = (currentBuf>>58) & 1;
if((parity_even_bit(dcf77Minute)) == parityBitMinute){
if((parity_even_bit(dcf77Hour)) == parityBitHour){
if(((parity_even_bit(dcf77DayOfMonth) + parity_even_bit(dcf77DayOfWeek)
+ parity_even_bit(dcf77Month) + parity_even_bit(dcf77Year))%2) == parityBitDate){
rtc.adjust(DateTime(rawByteToInt(dcf77Year) + 2000, rawByteToInt(dcf77Month),
rawByteToInt(dcf77DayOfMonth), rawByteToInt(dcf77Hour), rawByteToInt(dcf77Minute), 0));
}
}
}
}
unsigned int rawByteToInt(uint8_t raw){
return ((raw>>4)*10 + (raw & 0x0F));
}
//uncomment the following lines if you don't use an AVR MCU
//bool parity_even_bit(uint8_t val){
// val ^= val >> 4;
// val ^= val >> 2;
// val ^= val >> 1;
// val &= 0x01;
// return val;
//}
Ausgabe von dcf77_softRTC.ino
Und sieht dann das Ergebnis aus:
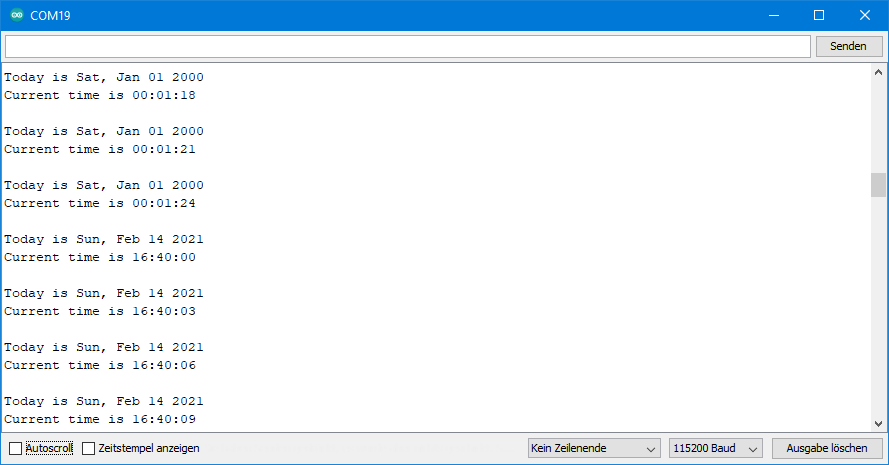
Idealerweise wird die Softwareuhr – so wie hier – nach ein bis zwei Minuten auf die DCF77 Zeit gestellt. Bei schlechtem Empfang kann es unter Umständen länger dauern.
Eine Version des Sketches mit schlankerer ISR findet ihr im Anhang 1.
Wenn ihr keine Interrupts wollt….
Wenn euch das Arbeiten mit den Interrupts stört, habe ich hier eine Version ohne Interrupts. Das Stellen der Uhrzeit ist zeitgesteuert. Da ich keine Lust hatte, lange zu warten, wird die Uhr alle zwei Minuten gestellt. Das macht natürlich praktisch keinen Sinn. Ihr könnt das aber unkompliziert auf z.B. alle paar Stunden abändern.
Der Nachteil an dieser Methode ist, dass ihr während der Einstellprozedur nichts anderes machen könnt.
Der Sketch ist noch recht kommunikativ. Ihr könnt ihn noch deutlich kürzen, wenn ihr etwas damit machen wollt.
#include "RTClib.h"
#include <util/parity.h> //comment out if you don't use an AVR MCU
int dataPin = 7;
RTC_Millis rtc;
void setup () {
bool validTime = false;
Serial.begin(115200);
#ifndef ESP8266
while (!Serial); // wait for serial port to connect. Needed for native USB
#endif
pinMode(dataPin, INPUT);
DateTime currentTime = DateTime(2000, 1, 1, 0, 0, 0); // Initial Date
while(!validTime){
if(getDcf77Time(currentTime)){
Serial.println("Date and Time updated!");
validTime = true;
}
else{
Serial.println("Sorry, something went wrong!");
}
}
rtc.adjust(currentTime);
}
bool getDcf77Time(DateTime &dcf77Time){
unsigned long long dcf77Sequence = 0;
bool successfulUpdate = true;
if(receiveSequence(dcf77Sequence)){
Serial.println("Sequence OK - received 59 bits");
printSequence(dcf77Sequence);
}
else{
Serial.println("Sequence NOT OK - wrong nuber of bits");
successfulUpdate = false;
}
if(evaluateSequence(dcf77Sequence, dcf77Time)){
Serial.println("Valid Sequence!");
}
else{
Serial.println("Invalid Sequence!");
successfulUpdate = false;
}
return successfulUpdate;
}
bool evaluateSequence(unsigned long long &buf, DateTime &dcf77Time){
bool parityOK = true;
uint8_t dcf77Year = (buf>>50) & 0xFF; // year = bit 50-57
uint8_t dcf77Month = (buf>>45) & 0x1F; // month = bit 45-49
uint8_t dcf77DayOfWeek = (buf>>42) & 0x07; // day of the week = bit 42-44
uint8_t dcf77DayOfMonth = (buf>>36) & 0x3F; // day of the month = bit 36-41
uint8_t dcf77Hour = (buf>>29) & 0x3F; // hour = bit 29-34
uint8_t dcf77Minute = (buf>>21) & 0x7F; // minute = 21-27
bool parityBitMinute = (buf>>28) & 1;
bool parityBitHour = (buf>>35) & 1;
bool parityBitDate = (buf>>58) & 1;
if((parity_even_bit(dcf77Minute)) != parityBitMinute){
parityOK = false;
Serial.println("Minutes not OK");
}
if((parity_even_bit(dcf77Hour)) != parityBitHour) {
parityOK = false;
Serial.println("Hours not OK");
}
if(((parity_even_bit(dcf77DayOfMonth) + parity_even_bit(dcf77DayOfWeek)
+ parity_even_bit(dcf77Month) + parity_even_bit(dcf77Year))%2) != parityBitDate)
{
parityOK = false;
Serial.println("Date not OK");
}
if(parityOK==false) {
return parityOK;
}
dcf77Time = DateTime(rawByteToInt(dcf77Year) + 2000, rawByteToInt(dcf77Month),
rawByteToInt(dcf77DayOfMonth), rawByteToInt(dcf77Hour), rawByteToInt(dcf77Minute), 0);
return parityOK;
}
unsigned int rawByteToInt(uint8_t raw){
return ((raw>>4)*10 + (raw &0x0F));
}
bool receiveSequence(unsigned long long &buf){
unsigned int counter = 0;
unsigned int lowCounter = 0;
unsigned int highCounter = 0;
Serial.println("Waiting for sequence start...");
waitForSequenceStart();
Serial.println("HIGH / LOW");
while(lowCounter < 150){
lowCounter = 0;
highCounter = 0;
while(digitalRead(dataPin)) {
delay(10);
highCounter++;
}
if(highCounter >= 15){
buf |= ((unsigned long long)1<<counter);
}
while(!digitalRead(dataPin)) {
delay(10);
lowCounter++;
}
Serial.print(counter);
Serial.print(". ");
Serial.print(highCounter);
Serial.print(" / ");
Serial.println(lowCounter);
counter++;
}
if(counter==59){
return true;
}
else{
return false;
}
}
void waitForSequenceStart() {
unsigned int lowCounter2 = 0;
while(lowCounter2<150){
lowCounter2 = 0;
while(digitalRead(dataPin)) {}
while(!digitalRead(dataPin)) {
delay(10);
lowCounter2++;
}
}
}
void printSequence(unsigned long long &buf){
unsigned long highBuf = (buf>>32) & 0x7FFFFFF;
unsigned long lowBuf = (buf & 0xFFFFFFFF);
Serial.print("Sequence, upper 4 bytes: ");
Serial.println(highBuf, BIN);
Serial.print("Sequence, lower 4 bytes: ");
Serial.println(lowBuf, BIN);
}
void loop () {
DateTime now = rtc.now();
TimeSpan updatePeriod = TimeSpan(0,0,2,0);
static DateTime nextUpdate = now + updatePeriod;
char buf1[] = "Today is DDD, MMM DD YYYY";
Serial.println(now.toString(buf1));
char buf2[] = "Current time is hh:mm:ss";
Serial.println(now.toString(buf2));
Serial.println();
if(nextUpdate < now){
if(getDcf77Time(now)){
rtc.adjust(now);
nextUpdate = now + updatePeriod;
}
}
delay(3000);
}
//uncomment the following lines if you don't use an AVR MCU
//bool parity_even_bit(uint8_t val){
// val ^= val >> 4;
// val ^= val >> 2;
// val ^= val >> 1;
// val &= 0x01;
// return val;
//}
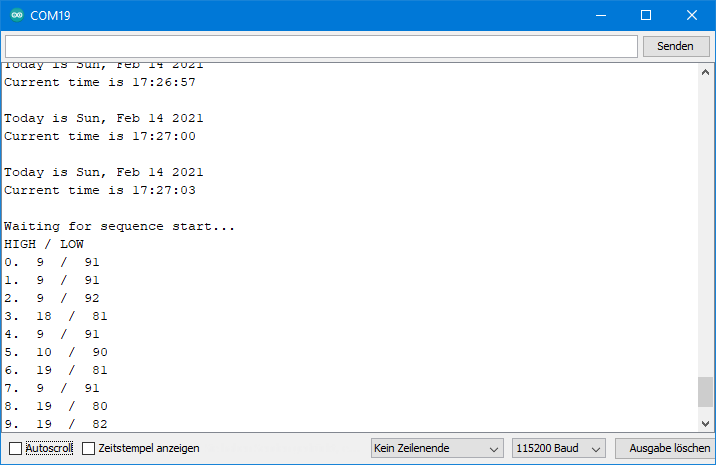
Ausgabe von dcf77_softRTC_without_interrupt.ino
So sieht der Sketch in Aktion aus:
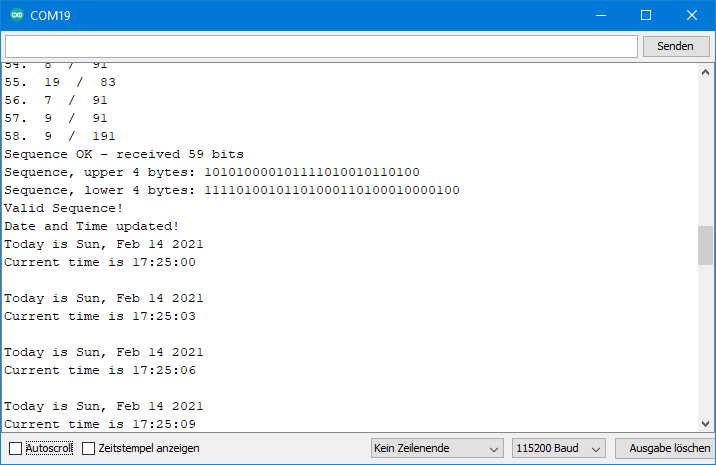
In der oberen Ausgabe seht ihr, dass die Uhr um 17:25 Uhr gestellt wird. Wie im Sketch festgelegt, erfolgt die nächste Einstellung zwei Minuten später:
Danksagung
Die Grundlage des Beitragsbildes, die Uhr, stammt von OpenClipart-Vectors. Das Funksymbol habe ich Clker-Free-Vector-Images zu verdanken. Beides – wie gewohnt – von Pixabay.
Anhang 1 – Uhrzeit auf einem 4-Ziffern Display
Und dann habe ich noch einen Sketch geschrieben, der die Uhrzeit auf einem TM1637-basierten 4-Ziffern Display ausgibt. Ich habe dazu die Bibliothek TM1637 von Avishay verwendet, die ihr auch über den Arduino Bibliotheksmanager installieren könnt.
So kann die Uhr dann aussehen:

Der Sketch ist recht umfangreich geworden. Man könnte theoretisch den Umweg über die Soft RTC weglassen und die Sequenz direkt in die Uhrzeit übersetzen. Allerdings hat das den Nachteil, dass eine Fehlsequenz zu einer falschen oder veralteten Zeit führen würde. In meiner Implementierung wird bei einer Fehlsequenz lediglich die Soft RTC nicht nachjustiert. Aber für eine oder wenige Minuten dürfte man auch mit der weniger genauen Soft RTC leben können.
#include <util/parity.h> //comment out if you don't use an AVR MCU
#include "RTClib.h"
#include <TM1637Display.h>
#define CLK 9 // Display pin CLK
#define DIO 10 // Display pin DIO
int interruptPin=2;
volatile unsigned long lastInt = 0;
volatile unsigned long long currentBuf = 0;
volatile unsigned long long nextBuf = 0;
volatile bool newMinute = false;
volatile bool timeValid = false;
volatile byte bufCounter;
RTC_Millis rtc;
TM1637Display display(CLK, DIO);
void setup(){
rtc.adjust(DateTime(2000, 1, 1, 0, 0, 0));
display.setBrightness(0x0f);
pinMode(interruptPin, INPUT);
attachInterrupt(digitalPinToInterrupt(interruptPin), DCF77_ISR, CHANGE);
}
void loop(){
static DateTime now = rtc.now();
if(newMinute){
if(timeValid){
evaluateSequence();
}
else delay(2000); // if time not valid and soft rtc is slow
now = rtc.now();
int timeAsInt = now.minute() + now.hour() * 100;
display.showNumberDecEx(timeAsInt, 0b11100000, true);
//display.showNumberDec(timeAsInt, true); // without "__:__"
newMinute = false;
}
}
void DCF77_ISR(){
unsigned int dur = 0;
dur = millis() - lastInt;
if(digitalRead(interruptPin)){
if(dur>1500){
if(bufCounter==59){
timeValid = true;
currentBuf = nextBuf;
}
else {
timeValid = false;
}
nextBuf = 0;
newMinute = true;
bufCounter = 0;
}
}
else{
if(dur>150){
nextBuf |= ((unsigned long long)1<<bufCounter);
}
bufCounter++;
}
lastInt = millis();
}
void evaluateSequence(){
byte dcf77Year = (currentBuf>>50) & 0xFF; // year = bit 50-57
byte dcf77Month = (currentBuf>>45) & 0x1F; // month = bit 45-49
byte dcf77DayOfWeek = (currentBuf>>42) & 0x07; // day of the week = bit 42-44
byte dcf77DayOfMonth = (currentBuf>>36) & 0x3F; // day of the month = bit 36-41
byte dcf77Hour = (currentBuf>>29) & 0x3F; // hour = bit 29-34
byte dcf77Minute = (currentBuf>>21) & 0x7F; // minute = 21-27
bool parityBitMinute = (currentBuf>>28) & 1;
bool parityBitHour = (currentBuf>>35) & 1;
bool parityBitDate = (currentBuf>>58) & 1;
if((parity_even_bit(dcf77Minute)) == parityBitMinute){
if((parity_even_bit(dcf77Hour)) == parityBitHour){
if(((parity_even_bit(dcf77DayOfMonth) + parity_even_bit(dcf77DayOfWeek)
+ parity_even_bit(dcf77Month) + parity_even_bit(dcf77Year))%2) == parityBitDate){
rtc.adjust(DateTime(rawByteToInt(dcf77Year) + 2000, rawByteToInt(dcf77Month),
rawByteToInt(dcf77DayOfMonth), rawByteToInt(dcf77Hour), rawByteToInt(dcf77Minute), 0));
}
}
}
}
unsigned int rawByteToInt(byte raw){
return ((raw>>4)*10 + (raw & 0x0F));
}
//uncomment the following lines if you don't use an AVR MCU
//bool parity_even_bit(byte val){
// val ^= val >> 4;
// val ^= val >> 2;
// val ^= val >> 1;
// val &= 0x01;
// return val;
//}
Anhang 2 – den DS3231 mit dem DCF77 stellen
Ihr könnt einen DS3231 mit einem DCF77 nachstellen. Die Kombination dieser Module macht Sinn, wenn ihr keinen zuverlässigen Empfang mit dem DCF77 habt. Ihr findet die Schaltung und meinen Sketch in diesem Beitrag.
Hallo Wolfgang!
Gerade habe ich mir das Canduiono Kit bestellt und will mich in dieses Thema einarbeiten.
Eigentlich bin ich schon lange bei der Elektronik und den Mikrocontrollern, aber leider immer wieder raus, du diverse persönliche Verhinderungen.
Die letzte Zeit bin ich häufiger über deine Seite gestolpert und muss dir attestieren, dass sie sehr gut gemacht ist, nicht überladen, aber alle nötigen Informationen bietet. Auch deine Programmierbeispiele funktionierten bisher bei mir, wobei das genutzte Material nur wenig war. Das ist bei vielen anderen Seiten nicht so.
Schön, dass du das anderen zugänglich machst.
Liebe Grüße
Frank
Vielen lieben Dank – ich hoffe, dass auch mit dem Canaduino alles klappt!
VG, Wolfgang
Das Problem der gestörten Synchronisation meiner vom Sender aus Mainflingen (DCF77) gesteuerten Funkuhrenhatte ich auch. Siehe dazu meinen Beitrag im Elektroniklabor :
https://www.elektronik-labor.de/AVR/DCFgenerator.html
Hallo Günther, interessantes Projekt. Danke für den Link. Zum Testen für DCF77-Anwendungen bei schlechtem Empfang eine schöne Idee. Schönen Feiertag noch!
VG, Wolfgang
Interessanter Artikel.
Allerdings würde mich sehr viel mehr interessieren, wie ich eine Funkuhr dazu bringe, dass sie statt des Funk-Signals die Zeit aus meinem WLAN holt, denn heute hat so ziemlich jeder Zugang zum Internet, aber wann immer eine Zeitumstellung ist, muss ich mehrere FRunkuhren im Haus abhängen und zu einem Fenster tragen, an dem der Empfang des DCF77 Signals funktioniert.
Im Grunde ist mir völlig gleichgültig, ob alle Uhren auf die Sekunde genau sind – denn ich hab ja auch andere Uhren und mein Router ist mein lokaler Zeitserver für alle anderen WLAN-Fähigen Geräte. Daher würde ich es vorziehen, meine Funkuhren dahingehend umzubauen, dass auch diese sich die WLAN-Zeit holen (denn ich hab noch nirgendwo eine WLAN-Uhr gefunden – jedenfalls keine, die kein versteckter Minicomputer ist – und die Anbieter von Funkuhren boykottieren offensichtlich eine solche Entwicklung, indem sie ihre Produkte so anpreisen, dass die Suche nach WLAN-Uhr automatisch zu DCF77-Uhren umgeleitet wird).
Da Sie iffensichtlich Fachkompetenz besitzen, dachte ich, ich könnte ja mal nachfragen.
Das ist natürlich schlecht, wenn die Funkuhren erst zum Fenster getragen werden müssen. Bei mir funktioniert das sowohl bei kommerziellen Funkuhren (Reisewecker) als auch beim Eigenbau ohne mein Zutun. Aber das kann von
von baulichen, geografischen und geologischen Gegebenheiten abhängen. Ich kann Ihnen zwar sagen, wie man die Uhrzeit z.B. mit einem ESP32-Mikrocontroller von einem NTP-Server abholt (s.u.), aber ich kann Ihnen nicht sagen, wie Sie einer kommerziell erworbenen Funkuhr WLAN-Fähigkeiten verleihen und dem Controller ein neues Programm verpassen.
Also wäre dann ein Selbstbau angesagt. So sieht ein Programm für einen ESP32 aus, das die Uhrzeit/das Datum aus dem Netz holt und auf dem seriellen Monitor darstellt:
#include <WiFi.h> #include <time.h> // Falls vorhanden: optionaler SNTP-Header (nicht in Funktionen includen!) #if __has_include("esp_sntp.h") #include "esp_sntp.h" #endif // --- WLAN-Zugangsdaten --- const char* ssid = "DEINE SSID"; const char* password = "DEIN PASSWORT"; // --- Zeitzone (CET/CEST) --- static const char* TZ_EU_BERLIN = "CET-1CEST,M3.5.0/2,M10.5.0/3"; // Optional: NTP-Server static const char* NTP1 = "pool.ntp.org"; static const char* NTP2 = "time.nist.gov"; static const char* NTP3 = "europe.pool.ntp.org"; bool waitForTime(uint32_t timeoutMs = 15000) { time_t now = 0; uint32_t start = millis(); do { time(&now); if (now > 8 * 3600) return true; // > 1970-01-01 delay(200); } while (millis() - start < timeoutMs); return false; } void printLocalTime() { struct tm tinfo; if (!getLocalTime(&tinfo)) { Serial.println("Zeit noch nicht verfügbar."); return; } char buf[64]; strftime(buf, sizeof(buf), "%Y-%m-%d %H:%M:%S %Z (%a)", &tinfo); Serial.println(buf); } void setup() { Serial.begin(115200); delay(200); Serial.println(); Serial.println("ESP32 NTP-Demo (Datum & Uhrzeit)"); // --- WLAN verbinden --- Serial.printf("Verbinde mit WLAN: %s ...\n", ssid); WiFi.mode(WIFI_STA); WiFi.begin(ssid, password); uint32_t start = millis(); while (WiFi.status() != WL_CONNECTED && millis() - start < 20000) { Serial.print('.'); delay(300); } Serial.println(); if (WiFi.status() != WL_CONNECTED) { Serial.println("WLAN-Verbindung fehlgeschlagen. Starte neu in 5s ..."); delay(5000); ESP.restart(); } Serial.print("Verbunden. IP: "); Serial.println(WiFi.localIP()); // --- NTP + Zeitzone konfigurieren --- configTzTime(TZ_EU_BERLIN, NTP1, NTP2, NTP3); Serial.println("Warte auf gültige Zeit vom NTP-Server ..."); if (!waitForTime()) { Serial.println("Keine Zeit erhalten. Prüfe WLAN/NTP und starte neu in 5s ..."); delay(5000); ESP.restart(); } Serial.println("Zeit synchronisiert."); printLocalTime(); } void loop() { static uint32_t lastPrint = 0; uint32_t now = millis(); if (now - lastPrint >= 1000) { lastPrint = now; printLocalTime(); } }Danke, aber das kenne ich grundsätzlich bereits.
Was ich bräuchte, wäre die Umsetzung dieses Zeitformats in eins, das ich der DCF77-Uhr „verkaufen“ kann, so dass sie glaubt, ein echtes DCF77 Signal empfangen zu haben.
Denn das scheint mir der einfachste Weg zu sein, dies umzusetzen; schliesslich will ich kein „echtes“ falsches Signal auf der entsprechenden Funkfrequenz senden, sondern der Uhr lediglich vorgaukeln, sie hätte eines empfangen.
Aber dazu benötige ich eben die Informationen, die Sie bereits haben – nur eben in umgekehrter Übertragungsrichtung, denn ich muss ja aus der Uhrzeit im PC-Format ein DCF77-Format gestalten, das auch den Ansprüchen eines DCF77-Empfängers genügt.
Dazu brauche ich dann auch noch die Taktungen, aber eben in digitaler Form, da anscheinend eine bloße Datenreihe nicht reicht.
Wenn ich zugang zum Ergebnis hätte, also der Uhrzeit, die dann NACH dem Empfang eingestellt wird, wäre das bestimmt besser, aber ich dachte, dass das schwieriger zu identifizieren wäre.
Deshalb dachte ich, es wäre denkbar, die Antenne zu deaktivieren und dem Empfang stattdessen per Kabel zu simulieren. Aber dazu muss ich eben wissen, wie Dise Daten ausschauen müssen und in welchem Abstand sie kommen müssen.
Ich brauche auch keine allgemeine Information dazu – es würde reichen, wenn ich die Uhr jeweils zum Gleichen Zeitpunkt irgendwann in der Nacht umstelle – praktischerweise um 03:05 (denn um 3 Uhr ist ja die Winterzeit/Sommerzeit-Umgestellt getan). Und selbst das muss nicht an jedem Tag erfolgen – es würde einmal im Monat reichen, die Uhr zu justieren.
Zudem möchte ich vermeiden, dass ein solches Bastelprojekt sicherheitsrelevante Informationen in sich birgt – und Kennung un Passwort zur SSID gehören definitiv dazu. Vielleicht nutze ich dann doch lieber eine I2C-Funkverbindung. Doch all das kommt erst zum Tragen, wenn ich das Umstellen der Uhr per Kabel hinbekommen habe … eins nach dem Anderen.
Ich gehe davon aus, dass Sie mit einer DCF77 Uhr keinen Selbstbau, sondern eine Funkuhr meinen, die Sie irgendwo fertig gekauft haben. Diese wird irgendeinen festverbauten Mikrocontroller mit iregendeinem Programm haben, der das Ganze steuert. Wie man sich da „hineinhackt“ kann ich Ihnen nicht sagen. Theoretisch könnte man die Verbindung zwischen dem DCF77 Modul und dem Mikrocontroller schaltbar machen: Leitungen trennen und über Transistor oder MOSFET wieder verbinden. Bei Bedarf könnte man dann das DCF77 Signal abschalten und durch ein eigenes ersetzen. Dazu müsste man das Uhrzeit in ein DCF Signal rückübersetzen. Zumindest diese Rückübersetzung ist kein Problem. Ich beschreibe in meinem Artikel ja, wie sich das Signal zusammensetzt. Das kann man auch umdrehen. Aber wenn Sie dann noch sagen, Sie wollen über das WLAN die Uhrzeit abfragen, aber Sie wollen das WLAN Passwort nicht verwenden, dann weiß ich wirklich nicht weiter.
Hallo Wolfgang,
bei mir geht es um den Bereich Gleichmäßigkeitsprüfungen im Oldtimer Rallye Bereich.
Dort benötige ich eine DCF77 Uhr deren Sekundenumschaltung sehr präzise erfolgt.
Ich habe keine Funkuhr gefunden, die auch nur annähernd umschaltet wie die Uhren des Veranstalters. Der Unterschied im Takt ist häufig sehr deutlich sichtbar.
Der verwendet digitale Tag Heuer Funkuhren zum Preis von einem Kleinwagen!
Ich suche eine DCF 77 Auswertung/Anzeigen deren Sekundentakt hochpräzise ist, also im Bereich von unter 0,1s.
Gibt es eine solche Lösung fertig, bzw. ist Deine Lösung dafür geeignet?
Vielen Dank
Ralf
Hallo Ralf,
es ist möglich, mit einer DCF77-basierten Uhr auf < 0.1 s Abweichung zu kommen, aber das ist auch nicht ganz einfach. Auf den ersten Blick sollte man meinen: kein Problem. Das Funksignal an sich ist exakt und geht niemals vor oder nach. Theroretisch müssten die Module exakt 100 ms oder 200 ms lange Signale liefern. Das tun sie aber nicht, wie man in meinem Beitrag sieht. Und nach der 58. Sekunde sollten genau 1800 oder 1900 ms Pause sein, bis dann die Minute umschaltet. Diesen Punkt genau zu treffen, ist die Herausforderung. In meinen Beispielen warte ich auf ein LOW-Signal, das länger ist als 1500 ms. Wenn das der Fall ist, definiere ich, dass der Minutenzyklus um ist. Allerdings finden dann noch Auswertungen statt und das Ganze soll ja auch noch auf dem seriellen Monitor dargestellt werden, was wieder eine gewisse Verzögerung darstellt. Es ist also nur ungefähr auf die Sekunde genau. Und ich berücksichtige nicht, ob das Signal der 58. Minute 100 oder 200 ms lang ist. Das kann man alles korrigieren und so anpassen, dass man unter 0.1 s kommt. Aber man muss es eben erst tun. VG, Wolfgang
Hallo Wolfgang,
vielen Dank für Dein Feedback.
Könnte also einen Versuch wert sein, mal sehen……
Gruss
Ralf
Hallo Wolfgang,
ich habe jetzt eine sehr gute Lösung erarbeitet.
D.h., gemessen via millis(), unter 10ms für DCF-Verarbeitung, RTC update und print Ausgabe an das LCD.
Geholfen hat:
– hd44780.h
– nur Ausgabe der Zeichen, die sich pro Sekunde ändern, LCD print ist sehr langsam
– LCD print getriggert via 1Hz SQW-Signal der RTC
Danke für Deine Webseite und die damit erfolgte Inspiration.
Bitte weiter so!
Ralf
Hallo Ralf,
vielen Dank, freut mich wenn mein Beitrag geholfen hat!
VG, Wolfgang
Hallo, vielen Dank für den interessanten Artikel!
Ich arbeite derzeit an einem Projekt, bei dem ich einen DCF77-Empfänger komplett von Grund auf neu entwickeln muss. Dabei geht es nicht darum, ein fertiges Modul zu verwenden, sondern den gesamten Signalweg selbst zu entwerfen: Antenne, LC-Filter, Verstärker, Hüllkurvendetektor und Komparator, sodass am Ende ein sauberes Digitalsignal für einen Mikrocontroller entsteht.
Für die Entwicklung möchte ich sowohl LTspice-Simulationen durchführen (um Verstärkung, Filterung und Hüllkurve zu testen) als auch das Layout in Altium Designer erstellen, um eine eigene kleine Platine aufzubauen.
Hat jemand hier Erfahrung mit der praktischen Umsetzung solcher Empfänger (z. B. Auswahl geeigneter OpAmps, Dimensionierung der LC-Schaltung, oder typische Stolperfallen beim PCB-Layout)? Über Tipps oder Hinweise würde ich mich sehr freuen!
Viele Grüße
Hallo, ich selbst kann damit nicht dienen. Aber vielleicht findet sich ja jemand mit Know-How in diesem Bereich.
Schau mal bei den Funkamateuren rein. Da gab es mal einen diskreten Bauvorschlag aus den 80igern. Dort hat man noch einen Quarz in HC8 Ausführung verwendet. Er verwendete einen TC440, Filteketten und am Ende viel diskrete TTL-IC’s, denn Micrcontroller gab es so noch nicht.
Der Artikel dazu beschrieb sehr detaliert, was genau in welche Stufe gemacht wurde.
Hey Wolfgang,
Danke für diesen tollen Beitrag, ich möchte ein eigenes Projekt mit der DCF Antenne machen, finde aber keine quellen für das Fritzing-bauteil. Könnten Sie mir einen Link teilen?
Hi, ich habe das Fritzing-Bauteil hier als Teil eines Fritzing Schemas gefunden:
https://www.hackster.io/edwinm/dcf77-oled-clock-8a860a
Man kann sich das Bauteil daraus abspeichern. Es sieht ein wenig anders aus als bei mir. Das liegt daran, dass ich die fertige Schaltung mit Photoshop überarbeitet habe.
Hallo Wolfgang, sehr interessant, Dein Beitrag, vielen Dank. Ich kann leider nicht programmieren, einen Arduino oder andere µC`s, um das Ausgangssignal des DCF77-Empfangsferrit-Modul zu dekodieren. Kannst Du mir vielleicht bitte sagen, ob es fertig programmierte µC`s oder Arduinos gibt und wo ich die besorgen kann?
Hallo Matthias, wenn du auf der Suche nach einer fertigen Lösung bist, dann könntest du dir doch eigentlich einfach eine Funkuhr kaufen. Oder, anders formuliert: Wenn du einen fertig programmierten Arduino kaufen könntest, was soll der dann können, was eine Funkuhr nicht kann? VG, Wolfgang
Hallo Wolfgang, danke für Deine Antwort. Ich wollte nur einen (Atomuhr-)genauen Sekundentakt erreichen. Doch dafür ist der Aufwand zu hoch. Ich mache das mit einem Quarz-Generator, 32.768kHz oder 3,2768MHz oder 4,194304MHz und einem passenden Teiler, das ist am Einfachsten und hinreichend genau.
Wenn du einfach nur das sekündliche Signal brauchst, dann kannst du das einfach an einem DCF77-Modul abgreifen, ohne zu programmieren. Du bekommst einmal pro Sekunde ein 100 oder 200 ms langes Signal. Einziger Nachteil: Bei Sekunde 59 gibt es kein Signal, um das Ende eines Minutenzyklus anzuzeigen.
Hallo Wolfgang,
zuerst einmal : Ein frohes Fest, DIR und deinen lieben !
Wie kann ich das 4-zeilige Display (HD44780) „einbauen“ ? Die Anzeige funktioniert endlich, und ich möchte die Ausgabe aber auf so ein LCD haben. I2C ist angeschlossen…mit dem I2C-Scanner wird mir auch die Adresse ausgegeben, aber ich bin blutiger Anfänger, und mache hier sicher viel falsch.
Frohes Fest nochmal, und einen guten Rutsch ! Mach weiter so…
Hallo Michael,
1) du inkludierst zusätzlich:
#include <Wire.h>
#include <LiquidCrystal_I2C.h>
2) du erschaffst ein lcd Objekt vor dem setup():
LiquidCrystal_I2C lcd(0x27,20,4); // 0x27: I2C Adresse, 20: Zeichen/Zeile, 4: Zeilen
3) im setup() fügst du hinzu:
lcd.init();
lcd.backlight();
4) In loop() schreibst du z.B.:
static DateTime now = rtc.now();
now = rtc.now();
char buf1[] = „DDD, MMM DD YYYY“;
Serial.println(now.toString(buf1));
char buf2[] = „hh:mm:ss“;
Serial.println(now.toString(buf2));
Serial.println();
lcd.setCursor(0,0);
lcd.print(now.toString(buf1));
lcd.setCursor(0,1);
lcd.print(now.toString(buf2));
Mit anderen Worten: du nutzt lcd.print() wie Serial.print(), nur dass du die Cursor-Position festlegen musst.
Viel Spaß!
VG, Wolfgang
Hallo Wolfgang,
zuerst einmal ein dickes DANKESCHÖN für die Antwort.
Nach unserem Urlaub (sind voll im packstress lol) werde ich es umsetzen. Die Ausgabeproblematik habe ich noch nicht begriffen. Mal sehen, aber das Basteln ist eine prima Frezeitaktivität mit Lerneffekt.
Ich muß aber mal nachsehen, wieso ich nicht benachrichtigt wurde…schönes Wochenende !!
LG Michael
Hi Michael,
ich würde sagen, da gibt es schlimmeren Stress!
Ich habe in der Datenbank nachgeschaut und wie es scheint, hast du das Abonnement für Kommentarantworten nicht bestätigt. Vielleicht hat sich das System auch verschluckt? Wahrscheinlich wirst du dann auch nicht über diesen Kommentar informiert. Kannst du versuchen, dich einfach noch einmal einzutragen?
Einen schönen Urlaub!
VG, Wolfgang
Nabend Wolfgang,
mache ich…liegt vielleicht an WEB …
Trotzdem, MERCI !
Test, test! Hast du jetzt eine Mail bekommen?
Ich habe die Kommentarfunktion selbst noch einmal getestet und sie funktioniert. Wenn du ein Kommentar-Abo auswählst, bekommst du eine E-Mail, in der du diese Absicht noch einmal bestätigen musst. Das ist eine gesetzliche Forderung. Diese E-Mails werden aber gerne von Spam-Filtern ausgesiebt, d.h. schau einmal in deinen Spam-Ordner.
Hallo Wolfgang,
dankeschön, alles funktioniert. Email bekommen, aus dem SPAM gefischt, usw. ab jetzt müsste ich immer Nachrichten erhalten. Lag am Provider.
Schönen Sonntag noch !
LG Michael
Hallo Wolfgang,
auf der Suche nach Ideen sowie deren Umsetzung stosse ich immer weider auf Deinen Blog.
Ein herzliches Dankeschön für Deine Motivation das hier zu pflegen, die guten Ideen und die akribische Umsetzung der Beschreibung (so im Falle DCF-Empfänger z.B. das Durchtesten verschiedener Module)!
Da hat mir schon Dein erster Sketch (geht IRGENDWAS?) sehr weitergeholfen und gezeigt dass zumindest die grundlegende Verkabelung zuerst problematisch war, aber nach Korrektur hier leider auch eine schlechte Empfangssituation herrscht.
Doch die Erkennung eines Problems ist ja schließlich der erste Schritt zu dessen Behebung, oder…? Danke und mach weiter so!
Danke fürs Feedback. Ja, schade, dass das mit dem Empfang oft so ein Problem ist. Jeder kleine 5 Euro Funkwecker bekommt das hin! Hoffe, es wird noch besser. Zunächst einmal ist die Ausrichtung der Antenne parallel zum Modul der erste wichtige Schritt.
Hallo Dieter,
schon mit dem DCF-Empfang weiter gekommen?
Ich habe hier schon alles mögliche probiert, bekomme aber leider keinen zuverlässigen Empfang. Ich habe das von Wolfgang favorisierte DCF77 Modul von Canaduino. Ich möchte meine selbstgebaute Wortuhr einmal in der Nacht über DCF77 synchronisieren. Aber leider müsste ich die Uhr so positionieren, dass man nichts mehr ablesen könnte. Ich habe interessehalber einen Funkwecker für ein paar Euro gekauft. Der funktioniert an der Stelle, wo auch meine Uhr steht, perfekt. Zudem kann ich diesen Billigwecker in jeder Lage hin stellen und der funktioniert immer sofort. Eine etwaige Ausrichtung in Richtung des DCF77 Senders ist absolut unnötig. Das ist irgendwie schon sehr frustrierend…
DCF-Empfang ist wirklich seltsam. Bisher ist es mir nur mit einem Netzteil gelungen, einen Empfang und damit Synchronisation zu bekommen. Letzte Woche gingen auf einmal alle Netzteile, die ich hier rumliegen habe. Immer sofort nach maximal 2 Minuten Synchronisation. Seit heute funktioniert einfach wieder gar nichts. Meine Uhr steht an der gleichen Stelle wie vorher. Lediglich wenn ich die Uhr an den USB-Port von meinem MacBook anschließe, klappt es wieder. Das soll einer verstehen…
Hi Claus, ja das klingt wirklich komisch. Werner es liegt kann ich dir nicht sagen. Es nervt einfach, dass die Teile trotz ihrer großen, klobigen Antenne so empfindlich sind. Zumal jeder olle kleine Funkwecker für ein paar Euro keine Probleme. Ich habe bisher keine Alternativen als Modul gefunden. Das Modell von Canaduino läuft bei mir ziemlich problemlos.
VG, Wolfgang
Hallo Wolfgang,
ist es vielleicht möglich, dass der Empfang ohne Interrupt besser funktioniert? Bzw. mit welchen Werten könnte man spielen um die Toleranz beim Empfang zu erhöhen?
LG
Claus
Ich habe ja im Beitrag Versionen mit und ohne Interrupt. Das kannst du ja beides ausprobieren. Aus meiner Sicht sollte es mit Interrupt besser gehen.
Um Fehler abzufangen, muss man erst einmal analysieren, wie die überhaupt aussehen. D.h. zurückgehen zu getSequence.ino und einfach mal schauen was da an Werten kommt. Idealerweise bekommst du nur Signale von 100 bzw. 200ms und Pausen von 800 bzw. 900 ms und einmal in der Minute 1800 oder 1900 ms Pause. Meiner Erfahrung nach kommst du in den Pausen kleine Signale, die da nicht hingehören. Die müsste man herausfiltern (softwaretechnisch oder sogar hardwaretechnisch). Ich habe dazu aber keine Lust mehr um ehrlich zu sein.
VG, Wolfgang
Hallo Wolfgang,
ich konnte das Problem jetzt finden und lösen.
Unter https://dcf77logs.de/live kann man live verfolgen, was gerade gesendet wird. Dadurch habe ich gesehen, dass es bei der Erkennung der langen Pause immer wieder Fehler gibt. Die Bits vorher wurden einwandfrei empfangen. Ich habe mir jetzt einen Code gebastelt, der nicht nur die Impulslänge misst, sondern explizit auch die vergangene Zeit zwischen den Impulsen (ist auf dieser Seite auch live zu sehen). Jetzt funktioniert alles perfekt und ich kann meine Uhr auch an der Stelle betreiben, wo ich vorher keine Chance auf Synchronisation hatte.
LG
Claus
Hallo Claus, schön, dass es klappt. Und Danke für den Link, den werde ich gleich mit aufnehmen. Kannte ich noch nicht. Interessant, dass es bei dir bei der langen Pause hapert. Wenn ich bei mir mit schlechten Modulen oder schlechter Antennenausrichtung Probleme habe, dann treten sie überall auf, was sich dadurch äußert, dass sowohl in den kurzen und als auch in der langen Pause kurze Extrasignale habe.
Viel Spaß noch!
VG, Wolfgang
Hallo Wolfgang,
das Thema mit dem guten Empfang bei diesen billigen Funkweckern hat mir doch keine Ruhe gelassen. Ich habe einen Wecker von Mebus (9 Euro) zerlegt und da ist dieses kleine Modul (DCF-3850N-800, Aufdruck Platine RC8000) mit sehr kleiner Antenne verbaut (50x8x3mm). Man könnte sogar die Antenne mit dem Modul direkt von diesem Wecker nehmen, da das genau die Antenne mit der kleinen Platine ist, die es überall zu kaufen gibt. Bei Aliexpress ca. 2-3 Euro. Diese billige und kleine Empfangseinheit funktioniert absolut perfekt. Ich habe das DCF77-Modul über 3,3V, GND, OUT (ist invertiert!) und PON (Low=aktiv) am ESP32 angeschlossen. Meinen Testsketch habe ich eine halbe Stunde laufen lassen und egal in welcher Lage und Ausrichtung die Antenne war, immer sofort Synchronisation bekommen. Aber wie schon vorher mal geschrieben, nur mit dem Sketch, wo auch explizit die lange Pause abgefragt wird, sonst gehts bei mir nicht. Ich wollte das hier posten, falls verzweifelte DCF77-Bastler hier landen. Vielleicht hilft das dann weiter.
LG
Claus
Hallo Claus,
vielen Dank!! Das ist ausgesprochen hilfreich. Schon aus dem fernen China bestellt. Kommt wohl anfang/Mitte Juni. Dabei fiel mir auf, dass es anscheinend noch eine zweite Variante DCF-1060N-800 gibt die noch 2 dB empfindlicher sein soll. Wenn ich das alles getestet habe, dann nehme ich das mit auf.
VG, Wolfgang
DCF-1060N-800 ist mit Antenne 60x10mm (rund)
DCF-3850N-800 ist mit Antenne 50x8x3 mm (rechteckig)
Die DCF-3850N-800 ist sehr klein und in diesen kleinen Funkweckern verbaut, genau die, die komischerweise überall und in jeder Lage funktionieren 🙂
Ich habe auf meinen Kommentar geantwortet, da es bei deinem Kommentar nicht ging.
Bin mal gespannt, ob diese Teile bei dir auch so gut funktionieren. Bei meinem Testsketch werden die empfangenen Bits auf dem seriellen Monitor ausgegeben, so kann sich das mit den Bits von der o.g. Homepage in Echtzeit vergleichen. Da habe ich gleich gesehen, dass das sehr gut aussieht.
Hallo Wolfgang,
nachdem meine ersten Versuche mit DCF77vollkommen fehlgeschlagen sind habe ich nach weiteren Anleitungen im Internet zu suchen. Dabei bin ich auch auf deine Webseite gestoßen.
Wie von die empfohlen habe ich mir auch dieses Canaduino Modul besorgt.
Welchen Trick muss man anwenden damit dieses Modul funktioniert ?
Offensichtlich muss man die Pin „AON“ und „PON“ an diesem speziellen Modul auch beschalten und ansteuern.
Leider finde ich keinen Hinweis ( oder ich habe es übersehen ) wie dieses zu geschehen hat. Welche der beiden Pins müssen in welcher Reihenfolge geschalten werden und wie, damit dieses Modul überhaupt über OUT ( ohne Überstrich ) ein Signal ausgibt ?
Es wäre schön, wenn du für dieses wohl speziellere Modul auch den Programmcode erklären, bzw. bereitstellen würdest.
Danke Roland
Hallo Roland,
der Anbieter stellt auf seinen Seiten eine Beschreibung des Moduls und seiner Anschlüsse zur Verfügung:
https://universal-solder.ca/downloads/CANADUINO_Atomic_Clock_Receiver_Kit_SMD.pdf
In Kurzform: PON an GND aktiviert das Modul, AON (Auto Gain) kann unverbunden bleiben). OUT mit Oberstrich gibt das Signal in der Logik aus, die ich in meinen Beispielen verwende, OUT ohne Unterstrich dreht das Signal um.
Wenn du Signale empfängst, dann blinkt die LED OUT entsprechend, d.h. 800-900 ms an / 100-200 ms aus. Wenn du die kleine Kontaktbrücke an LED trennst, dann sind die LEDs aus und du sparst Strom.
Ich werde den Link zur Anleitung in den Artikel übernehmen.
VG, Wolfgang
Du hast die Theorie gut beschrieben.
Hier ist mein Vorschlag für eine DCF77 Bibliothek, vielleicht können wir ja von einander lernen:
https://github.com/1ux/ArduinoDCF77Decode
„Focusing on clean code, this library implements almost the entire public DCF77 standard in C.“
Liebe Grüße,
lux
Hi lux,
pulseIn ist auch ein interessanter Ansatz. Ich habe den Beispielsketch ausprobiert und er funktioniert nach einer kleinen Anpassung. Ich werde dir das über GitHub als Issue mitteilen. Ein gewisser Nachteil ist, dass die Signalauswertung den Sketch für eine Minute blockiert. Das schränkt die Anwendbarkeit ein. Eine mögliche Applikation wäre das Stellen einer RTC einmal pro Stunde oder Tag. Da wäre dann eine Blockade von einer Minute akzeptabel. So ähnlich wie ich das in meinem Sketch dcf77_softRTC_without_interrupt.ino gemacht habe.
Wenn du vorhast, die Bibliothek über den Arduino Library Manager auffindbar zu machen, dann ist hier die Anleitung dazu:
https://github.com/arduino/library-registry
VG, Wolfgang
Deine Antworten sind klasse und ich schätze deine faire und konstruktive Art.
Ich habe die Vorschläge auf github berücksichtigt und eingepflegt, vielen Dank dafür.
Du hast bereits den Hauptnachteil der Implementierung durch die Blockierung offen gelegt. Diesen Punkt kann ich so schnell nicht ändern.
Die Geschichte mit dem „Arduino Library Manager“ ist mir tatsächlich noch unklar und ich habe überlegt es zu tun. Aber ich bin mir noch im Unklaren darüber ob die Welt meine DCF Implementierung braucht 😉
Liebe Grüße,
(dl5)lux
Hallo Wolfgang,
muss im Moment für die Schule eine Funkuhr mit dem Arduino bauen. Dabei benutze ich den Arduino UNO, ein DCF77 Reichelt Modul und eine 4 Stellige 7 Segmentanzeige (4 Digit Display V1.2). Dank deiner Seite habe ich es hinbekommen auf dem Seriellen Monitor die richtige Uhrzeit zu empfangen. Doch jetzt scheitere ich leider daran diese Uhrzeit auf der 7 Segmentanzeige anzeigen zu lassen. Jetzt wollte ich fragen ob du eventuell irgendwelche Lösungsvorschläge hast.
MfG Emilius
Hi Emilius, du hattest die Frage schon einmal gestellt, aber zu meinem Beitrag über das DS3231 RTC Modul. Aber egal, hier meine Antwort:
Hi, das müsste so ein TM1637 basiertes Teil sein, richtig? Dann würde die folgende Bibliothek funktionieren:
https://github.com/avishorp/TM1637
Die Bibliothek findest du auch über den Bibliotheksmanager der Arduino IDE. Da gibt es auch einen Beispielsketch. Für die Uhrzeit sollte es so gehen:
Ausgabe = Stunden × 100 + Minuten
und dann:
display.showNumberDec(Ausgabe, true);
VG, Wolfgang
Hallo Wolfgang,
schonmal vielen Dank für deine Hilfe und sorry für das erneute nachfragen. Bei mir war meine erste Frage nur leider Verschwunden. Deine oben genannten Tipps habe ich versucht in einen Code zu schreiben. Jetzt funktioniert mein Display auch nur leider zeigt es jetzt meistens 00:00 oder eine willkürliche Uhrzeit an. Vielleicht sieht du ja einen Fehler in meinem Code:
#include
#include // Kommentiere es aus, wenn du keinen AVR-MCU verwendest
#define CLK 9
#define DIO 10
TM1637Display display(CLK, DIO);
int interruptPin = 2;
volatile unsigned long lastInt = 0;
volatile unsigned long long currentBuf = 0;
volatile byte bufCounter;
void setup() {
Serial.begin(115200);
pinMode(interruptPin, INPUT);
attachInterrupt(digitalPinToInterrupt(interruptPin), DCF77_ISR, CHANGE);
display.setBrightness(0x0f); // Setze die Helligkeit der Anzeige (0x00 bis 0x0f)
}
void loop() {
// Nichts im Loop außer Anzeige der Uhrzeit
displayTime();
delay(1000); // Wartezeit, um die Anzeige nicht zu flackern
}
void displayTime() {
byte dcf77Minute = (currentBuf >> 21) & 0x7F; // minute = 21-27
byte dcf77Hour = (currentBuf >> 29) & 0x3F; // hour = bit 29-34
int minute = rawByteToInt(dcf77Minute);
int hour = rawByteToInt(dcf77Hour);
// Anzeige der Uhrzeit auf der 4-stelligen 7-Segmentanzeige
display.showNumberDec(hour * 100 + minute, true);
}
void DCF77_ISR() {
unsigned int dur = 0;
dur = millis() – lastInt;
if (digitalRead(interruptPin)) {
if (dur > 1500) {
currentBuf = 0;
}
} else {
if (dur > 150) {
currentBuf |= ((unsigned long long)1 <> 4) * 10 + (raw & 0x0F));
}
//uncomment the following lines if you don’t use an AVR MCU
//bool parity_even_bit(byte val){
// val ^= val >> 4;
// val ^= val >> 2;
// val ^= val >> 1;
// val &= 0x01;
// return val;
//}
Hallo Emilius,
ein wenig vom Sketch ist verloren gegangen. Das liegt daran, dass die Kommentarfelder den Text als HTML interpretieren. Ich habe das dann rekonstruiert. Neben ein paar kleineren Dingen gab es ein Hauptproblem, und zwar dass du sekündlich currentBuf zur Ermittlung der Uhrzeit heranziehst. Die Variable currentBuf wird aber zu Beginn des Minutenzyklus auf 0 gesetzt. D.h., bis die Stunden und Minuten übermittelt werden, erhältst du 0. In meinem softRTC Sketch ist das kein Problem, da ich die softRTC immer nur nach Beendigung einer Minutensequenz nachstelle.
Ich habe das mal geändert, indem ich eine neue Variable nextBuf eingeführt habe, die die neuen Werte aufnimmt. Nach einer vollständigen Sequenz wird nextBuf in currentBuf kopiert. Ich sende dir den Sketch per mail. Er gibt die Zeiten auf dem seriellen Monitor aus. Du müsstest das nur auf das 4 Zifferndisplay umschreiben, aber das sollte kein Problem sein.
VG, Wolfgang
Hallo Emilius,
zusätzlich zu den Versionen, die ich dir geschickt habe, habe ich noch eine „Luxus“-Version geschrieben und in Anhang 2 des Beitrages veröffentlicht. Der Sketch ist recht umfangreich, hat aber den Vorteil, dass die Uhr auch bei einer Fehlsequenz über die Soft RTC weiterläuft.
VG, Wolfgang
Hi, Arduino Programmierung ist toll, ich möchte aber das DCF77 Programm in einen ESP32 unter Homeassitant einbinden. Weiss jemand wie man sowas macht ? Include Befehl sagt mir was, aber wie macheich die Daten dann im YAML bzw Homeassistant verfübar. Leider ist das Netz hier wenig aussagekräftig. Jeder Hinweis ist willkommen. Danke
Hallo Norbert,
zumindest ich kann da nicht weiterhelfen, da mir die Erfahrung mit Homeassistant fehlt. Ich würde vielleicht mal auf der Homeassistant Seite fragen:
https://www.home-assistant.io/
Hallo Wolfgang,
habe erst vor kurzem Deinem „Elektronikkiste“ entdeckt. Lebe in Österr. und heisse Alex.
Programmiere schon einige Zeit und bin echt begeistert von Deinen Sketchen und vor allem von Deinen Beschreibungen.
Arbeite gerade an einer Wetterstation (BME280, RTC, HC-12, Arduino Nano mit 6V Solarmodul) im Glashaus, schickt brav die Daten mittels Structur ins Haus, leider die Umstellung auf Sommerzeit habe ich vergessen
Da wir heute die Sommerzeit wieder haben musste ich die Uhr im Glashaus umstellen und das hat mich geärgert.
Deshalb möchte ich jetzt den Sketch nutzen um dies nicht mehr tuen zu müssen.
Jedenfalls echt super Deine Beiträge.
Hallo Wolfgang,
ich teste gerade einen DCF77 Empfänger mit Deinen Sketches auf einem NANO (328P).
Der „dcf77_softRTC_without_interrupt.ino“ funktioniert wie er soll, nur der „dcf77_sequence_evaluation.ino“ bringt immer parity not ok, immer.
Bei genauerem hinsehen fällt auf, daß Year, Month, Day of Month, … irgendwie immer das doppelte vom erwarteten Wert ist (heutige Werte!):
…
16:29:56.998 -> 57. 82 / 905
16:29:58.038 -> 58. 111 / 888
16:29:59.158 -> 59. 224 / 1782
16:30:00.918 -> Signal, upper 4 bytes: 1001000001101000010110101
16:30:00.918 -> Signal, lower 4 bytes: 10001100001010000110101010100000
16:30:00.918 -> Minute parity not OK
16:30:00.918 -> Hour parity not OK
16:30:00.918 -> Current date and Time:
16:30:00.918 -> Year: 48
16:30:00.918 -> Month: 6
16:30:00.958 -> Day of Month: 11
16:30:00.958 -> Day of the Week: 4
16:30:00.958 -> Hours: 32
16:30:00.958 -> Minutes: 61
16:30:00.958 -> 0. 0 / 16
16:30:00.998 -> 1. 63 / 898
16:30:02.038 -> 2. 114 / 910
…
Ich tu mich da beim Finden der richtigen Stelle schwer …
Gruß André
Hi Andre,
sind deine LOW Phasen klar über 150 ms? Das ist die Grenze, die ich gesetzt habe (Zeile 38). Bei den Modulen gibt es große Qualitätsunterschiede. Idealerweise bekommst du Wertepaare 100 / 900 oder 200 / 800. Schwächere Module neigen zu zu kurzen High-Phasen und zu Fehlmessungen. Was ich in deinem Ausschnitt sehe, ist, dass dein letzter Wert 59 ist. Da ist schon mal irgendetwas im Argen. Der letzte Wert muss Nr. 58 sein. Und der erste Wert der neuen Reihe (Nr. 0) ist 0 / 16. Das ist eine Fehlmessung. Wenn das Modul keine sauberen Wertepaare ausgibt, kann die Reihe nicht ausgewertet werden. Evtl. kannst du die Signalqualität verbessern, wenn du das Modul per Batterie mit Strom versorgst. Evtl. hilft auch ein anderer Standort. Wenn beides nicht hilft, dann hilft nur ein anderes Modul.
VG, Wolfgang
Hallo Wolfgang,
das Modul funktioniert, und ich habe guten Empfang. Dein Sketch dcf77_softRTC_without_interrupt.ino“ rennt ja, nur selten mal ein Fehler! Ich wollte halt den erwähnten „dcf77_sequence_evaluation.ino“ mit Interrupt für mich als „Basis“ nehmen, und den weiter ausbauen, nur da bekomme ich nie gültige Werte.
Ja, die „0“ und „1“ lässt sich eindeutig unterscheiden, ca. 75 … 115 und 190 … 216 sind ganz grob die Werte.
Gruß André
Du weißt sicherlich besser, was du misst, aber in dem kleinen Ausschnitt, den du mir geschickt hast, waren allein schon zwei Fehler. Bekommst du denn sonst immer brav Wertepaare bis Nr. 58 und nicht bis Nr. 59? Ein Fehler am Sketch kann ich eigentlich ausschließen, da er schon so häufig von mir und anderen erfolgreich im Einsatz war. Dass der Sketch dcf77_softRTC_without_interrupt.ino bei dir funktioniert und dieser nicht, kann ich mir nicht erklären. Beide Sketche geben ja Wertepaare aus. Du könntest mal beide hintereinanderlaufen lassen und die Sequenzen vergleichen. Wenn du nicht gerade einen Stundenwechsel überschreitest, sollten alle Bits bis auf 21 – 28 (also die Minuten) gleich sein. Mehr fällt mir dazu im Moment nicht ein.
Du könntest mir auch mal 2-3 Minuten Wertepaare senden (wolfgang.ewald@wolles-elektronikkiste.de). Vielleicht fällt mir ja irgendetwas auf.
Hallo Wolfgang,
simple Frage: Woher hast du das DCF Modul in deinem Fritzing Schaltplan?
Ich habe ein ähnliches Projekt gemacht und kann jetzt den Schaltplan nicht vervollständigen da ich es nicht finden kann…
Danke im Voraus
Steven
Hi Steven,
wenn ich mich recht erinnere, dann habe ich das Teil aus dem Fritzing Schema von diesem Projekt extrahiert:
https://www.hackster.io/edwin-martin/dcf77-oled-clock-8a860a
Nachdem ich meine Schaltung damit kreiert habe, habe ich das Ergebnis noch mit Photoshop bearbeitet.
VG, Wolfgang
Hallo Wolle,
ich habe ein Problem. Ich verwende den Interuptcode des DCF77 und SoftRTC – der Sketch
Bei mir bleibt die Anzeige bei „Waiting for sequence start…“ stehen und macht nichts.
Empfangsqualität meines Moduls ist aber gut. Hast du eine Idee, woran das liegen könnte?
Hi Sven,
wie lange hast du denn gewartet? Es dauert bis zu einer Minute, bis die Sequenz startet. Und bekommst du mit dem Sketch dcf77_sequence_evaluation.ino gültige Sequenzen, sprich ein sinnvolles Datum? Wenn ja, dann wundert mich das, weil beide Sketche im Prinzip dasselbe machen. Wenn nein, könnte es sein, dass du ein Modul mit invertiertem Ausgang hast? Das würde sich darin äußern, dass der Signalpin die meiste Zeit HIGH ist und die eigentlichen Signale (100 bzw 200 ms) LOW sind.
VG, Wolle
Moin Wolfgang. Ich habe für mich den Fehler gefunden. Ich habe einen Pro Mini 3,3V.
Theoretisch hat er zwei Interrupt Pins: 2,3
An Pin 2 funktioniert die Synchronisierung nach ca. 2 min.
Wenn ich auf Pin 3 gehe, passiert nichts. Der Code ohne Interrupt bleibt auch nach mehr als 5 Minuten leer, gibt also keine Daten.
Wie kann ich den PIN 3 für das Pollin Modul verwenden, denn ich wecke den Arduino über das DS3231 über PIN 2?
Wofür ist der Interrupt des DCF77 gut? Denn in meinem Code wird abhängig von DS3231 der Abgleich mit dem DCF77 zu einer bestimmten Zeit ausgelöst. Ich brauche also weder einen Weckinterrupt noch einen regelmäßigen Abgleich.
Wenn du den Pin 3 nutzen willst, dann änderst du einfach die Zeile
byte interruptPin = 2;
auf 3 ab. Ich wüsste nicht warum das nicht funktionieren sollte.
Die andere Frage habe ich vielleicht nicht verstanden. Die Interrupts sind dazu da, damit das sekündlich kommende DCF77 Signal ausgewertet wird. Du schreibst etwas vom DS3231, den ich hier ja gar nicht verwende, sondern lediglich die Bibliothek, um damit die „Software Uhr“ zu stellen, die recht ungenau ist, da sie auf dem Systemtakt basiert. Wenn du einen DS3231 verwendest brauchst du das nicht. Oder höchstens um den DS3231 ab und zu nachzustellen.
VG, Wolfgang
FORTSETZUNG DER DISKUSSION MIT MANUEL (s.u.)
Hallo Manuel,
ich habe gute Neuigkeiten! Ich habe ein Modul von Pollin getestet und festgestellt, dass die HIGH Signale bei Verwendung des Arduinos als Stromquelle erheblich kürzer sind als die erwarteten 100 bzw. 200 ms. Die Werte lagen eher bei 65 und 150 und waren stark schwankend, sodass relativ viele Fehlmessungen auftraten. Eine Besserung hat sich ergeben, als ich das Kriterium für ein Langsignal von > 150ms auf > 120ms gesenkt habe (das ist die Zeile if(dur > 150){ .Du könntest auch einmal den Sketch dcf77_sequence_evaluation nehmen, um die Signalzeiten zu überprüfen.
Das ist aber nur Symptombekämpfung. Ich habe mir mal das Datenblatt vom Pollin-Modul durchgelesen und dort steht, dass die Signalqualität sehr stark von der Qualität der Spannungsversorgung abhängt. Der Ripple sollte kleiner als 10 mV sein. Der Ripple ist eine periodische Spannungsschwankung, die beim Herunterregeln von Spannungen entstehen kann. Das könnte dein Problem bei der Versorgung mit dem Ladegerät erklären.
Ich habe die Spannungsversorgung des Moduls auf eine Li-Batterie (3.7 V) umgestellt. Die Signalqualität hat daraufhin für mich sehr überraschenden Sprung gemacht. Viel näher an den 100/200 ms. Was ich auch noch festgestellt habe, ist, dass das Modul empfindlich auf Berührung während der Messung reagiert und es anscheinend bestimmte elektrische Felder nicht mag. Nähe zu meinem Monitor hat das Signal verschlechtert.
Vielleicht schaust du mal in die Richtung.
Hallo Wolfgang,
ja genau, ich hatte zwischenzeitlich auch mal gemessen und festgestellt, dass bei Betrieb mit einem 1 A Netzteil quasi nichts aus dem DCF Modul kam. Als ich dann ein 30 W Netzteil genommen habe ging es schon besser (Zeit wurde richtig synchronisiert, Datum war aber falsch). Da ich von den 1 A Netzteilen jetzt so viele rumliegen habe, schreibe ich den Sketch dahingehend um, dass ich das LCD-Modul nur 1x / h für 10 Minuten aktiviere. Dient eh nur zur gelegentlichen Kontrolle.
Oder gäbe es eine bessere Idee?
Danke für alles.
…oder könnte man vielleicht an den 3,3 V Ausgang des Aruino einfach einen 3,6 V Akku (2032) löten und die Spannung so stabilisieren?
Akkus verwende ich auch und ist die beste Variante.
Ich empfehle dann noch ein Einschalten per Mosfet oder Relais, denn so oft braucht man den Zeitsbgleich nicht.
Ich mache ihn einmal am Tag und schalte dafür über ein Relais die Versorgung ein.
Ich stimme Sven zu. Zu der anderen Frage: Zusätzlich einen Akku an den 3.3 V Ausgang zu hängen, würde ich nicht empfehlen. Du könntest aber probieren, den Arduino mit deinem Netzteil zu betreiben und das DCF77 Modul nur mit dem Akku. Die DCF77-Module brauchen nur wenig Strom. Pollin gibt für sein Modul < 0.1 mA an. Da kommst du selbst mit einer Knopfzelle ein paar Monate hin. Wenn du das machst, dann darfst du nicht vergessen, dass das Modul und der Arduino dasselbe GND haben (also nicht einfach nur die Daten-/Steruerleitungen verbinden).
Ich plapper mal nun aus dem Nähkästchen. Ich baue gerade eine mechanische Uhr, die maximal Energie spart, da ich an dem Ort der Uhr keine Stromversorgung bekomme.
Ich bin soweit, dass die Uhr läuft, aber noch nicht mit dem DCF77 Signal synchronisiert wird. Das soll noch kommen, aber gerade habe ich nicht die Zeit dafür.
Was die Uhr nun kann:
Aufwachen, Zeiger bewegen, und dann wieder bis zur nächsten Aktion maximal Energie sparen. Dann sind Routinen eingebaut, um die Uhr bei mutwilligem Verstellen wieder zurück zur Zeit zu bringen. Das erfolgt einmal die Stunde bzw. zwei mal am Tag. Es braucht also etwas Geduld. Alles was nicht unbedingt notwendig ist, wird abgeschaltet. Dazu verwende ich Mosfets, da normale Magnetrelais nicht genug Schaltvorgänge (10000) durchlaufen können,damit die Uhr länger als zwei Monate lebt. Nach 68 Tagen sind bei einer Aktion die Lebenszeit von 10000 Schaltzyklen erreicht.
Des weiteren gibt es die Option eines längeren Schlafmodus, dass z.B. in einem bestimmten Zeitintervall die Uhr abgeschaltet wird. Das spart auch noch unheimlich viel Energie.
Nun zum DCF 77 Modul:
Mir ist aufgefallen, dass beim Powerdown Modus auch der Spannungswandler abschaltet. Für das DCF Modul bedeutet das, dass es zu viel Strom bekommt. Daher muss ich die Stromversorgung (Plus Leitung) mit einem Mosfet einschalten und damit auch den Spannungswandler.
Vielen Dank für das Teilen deiner Erfahrungen!
Hm nein, das DCF-Modul mit Batterie zu betreiben hilft auch nicht, leider. Es muss noch irgend etwas anderes sein. Es passiert genau das gleiche. 🙁
Kannst du mal den Sketch dcf77_sequence_evaluation.ino für 2-3 Minuten durchlaufen lassen und mir die Ausgabe zuschicken? An: wolfgang.ewald@wolles-elektronikkiste.de.
Ich würde gerne mal sehen, wie weit die Signale von einer auswertbaren Qualität entfernt sind.
Hallo Wolle,
nach längerer Zeit habe ich mal wieder gebastelt und probiert. Zur Erinnerung: Ich hatte (und habe noch) arge Probleme mit der Spannungsversorgung bei meinem DCF77-Arduino Projekt.
Es ist schon fast phänomenal, wund für mich absolut nicht erklärbar was da passiert. Inzwischen habe ich ein altes AT-Netzteil für die Versorgung genommen, in dem Glauben, damit müsste jetzt alles funktionieren. Aber weit gefehlt. Die Versorgung des DCF-Moduls funktioniert schon mal nicht. Also weiter auf Batteriestrom gesetzt (Solange das DCF-Modul nur mit einer Batterie gespeist und wird, kann ich am Ausgang Gleichspannungs-Sprünge messen). Wenn das Modul in der Nähe meiner Schaltung liegt (beinhaltet auch AT-Netzteil und Lautsprecher) und ich diese einschalte, springt der Ausgang des DCF auf 0V. Wenn ich es entferne (ca. 1,5 m) läuft Der Puls wieder. Wenn ich jetzt Masse und Ausgang des DCF mit meinem Arduino verbinde ist wieder Feierabend. 🙁
Jemand eine Idee??
Lieben Dank und Gruß
Hallo,
ich hatte fast das gleiche Symptom. Im Versuchsaufbau hat es funktioniert und auf der Leiterplatte ging nichts mehr. Die Ursache war das Schaltnetzteil HLK-PM03 (Printnetzteil 3.3V). Defekt ist das Schaltnetzteil allerdings nicht. Im Versuchsaufbau hatte ich eine altes Steckernetzteil mit Trafo. Die Idee hatte ich aus einem Forum, in dem Probleme mit einem MeanWell Schaltnetzteil und einem DCF-Funkuhrenmodul beschreiben wurden. Jetzt auf der neuen Platine ist ein Trafo mit anschließender Stabilisierung und es funktioniert. Meine Hardware ESP-01, Trafonetzteil und ein altes Outdoor Funkuhrenmodul von Conrad für eine C-Control.
Grüße Frank
Hallo,
erst einmal Danke an Frank für die Tipps. Hoffe, es hilft. Generell muss man sagen, dass der DCF77 Empfang wohl relativ leicht gestört werden kann. Ich hatte die Erfahrung gemacht, dass der Empfang in der Nähe meines Monitors deutlich schlechter geworden ist.
Das Manual vom Canaduino DCF77 Modul sagt: The ferrite bar antenna should be located as far as possible from conductive metal walls, PCB ground plane or ferromagnetic objects (speakers). All those objects affect the antenna tuning and can
attenuate the received signal. To avoid noise coupling the ferrite antenna should also not be pointing towards noisy electronic circuits (figure 3). It is a good practice to turn off all unnecessary electronic circuits when receiving the weak radio transmission.
Also, weg von allem ferroomagnetischen Bauteilen und rauschenden Schaltkreisen. Lautsprecher werden auch explizit genannt. Und die Antenne sollte parallel zum Modul ausgerichtet sein und nicht in Richtung des Moduls zeigen.
Vielleicht hilft das ja auch.
VG, Wolfgang
Hallo @Wolfgang und all die Leser die immer wieder mit ihren Problemchen bezüglich der Spannungsversorgung, besonders für die DCF77 Module hier verschiedene Versuche machen, und einen eigentlich unnötigen Aufwand, wie eine zusätzliches Steckernetzteil verwenden.
Ich bitte euch mal ganz logisch an die Sache heranzugehen, und auch die technischen Grenzen voll auszunutzen.
Dieses besonders das Canaduino Board hat einen sehr breiten Spannungsbereich.
Egal ob man ein Schaltnetzteil 5 Volt, oder 3,3 Volt oder einen LiPO Akku mit einer Nennspannung von 3,7 V als Stromquelle verwenden möchte, aber dennoch eine geschaltete Funktion benötigt um div. Platinen außerhalb des Controllers ( Arduino ) gezielt Spannungsfrei zu schalten.
Schaut euch doch mal bitte die LDOs der Firma Microchip an.
Egal ob MCP180x/ MCP170x / MCP172x oder MCP182x in SOIC-08 oder SOT23-5 können diese Regler mittels des vorhanden SHDN ( mit Überstrich – hier leider nicht korrekt darstellbar ) dazu genutzt werden um die daran angeschlossenen Platinen und ext. Geräte gezielt abzuschalten. Dazu reicht es an diesen SHDN Eingang eine Spannung größer 0,8 Volt bis zur eingespeißten Inputspannung anzulegen. Damit ist der Ausgang freigeschaltet. Ebenso, wenn diese LDOs nicht bis an Ausgangsstromlimit belastet werden reicht hier eine minimale Drop-Spannung von ca. 120 mV. Was wiederum bedeutet, aus 3,3V eines Schaltnetzteils bzw eines 3,7 V LiPo Akkus kann man ganz problemlos 3,0 Volt machen, mit das besagte DCF77 Modul immer noch vollumfänglich funktioniert.
Nun werden sicherlich Einwände kommen, das damit die Ausgänge dieses Moduls an nur mit eine Ausgangspegelspannung liefern werden / können ! Aber wo ist nun das Problem ?
Selbst wenn man von einem 5,0 V Arduino Board ausgeht, reicht das immer noch den High Pegel sicher zu erkennen. Den der TTL High Pegel ist mit 2,1 Volt bis 5,0 Volt eindeutig so definiert, und wird auch vom ATMega328 so interpretiert, dass die Ausgangssignale des Canaduino Boards immer noch korrekt verstanden werden, wenn dieses DCF77 Modul mit nur 3,0 Volt bereitgestellt über einen der genannten LDOs betrieben wird.
Aber auch die Verwendung eines StepDown-Moduls mit einem größeren Wandlerbereich und einer Taktfrequenz bis über 200 kHz stellt für diese LDOs kein Problem dar. Dieses DCF77, wie auch andere externe Beschaltungen funktionieren einwandfrei, und störungsfrei. Wer als Eingangspannung mit anderen Spannungswerten seine Schaltungen betreibt, diese LDOs haben eine breite Palette an Festspannungswerten, und sind je nach Modell mit den gleichen Eigenschaften eines besonders geringen Drop, und der Fähig des SHDN als ADJ Versionen verfügbar. Eigentlich sollte sich für fast jeden Anwendungsfall ein passender LDO finden lassen. Versucht, traut euch ran.
Ich selber nutze diese LDOs dieser Firma schon seit Jahren für all mein Projekte sei es Netzspannungs-versorgt ( Schaltnetzteile mit einem beliebigen Ausgangsspannungen ) oder Mobil mit unterschiedlichen Batterie und Akku Quellen. Bisher konnte ich noch keine Auswirkungen irgendwelcher hochgetakteten Spannungskonverterstufen nach einem solchen LDO feststellen.
Hallo Franky,
vielen Dank für den gehaltvollen Kommentar. Ich glaube allerdings nicht, dass die Spannungsversorgung in diesem Fall das Problem ist. Das Manual des Canaduino DCF77 warnt ausdrücklich davor, das Teil in die Nähe eines Lautsprechers zu bringen – und genau das ist die Beobachtung von Manuel, dass es dann nicht mehr funktioniert. Ich kann auch bestätigen, dass die Ausrichtung der Antenne parallel oder senkrecht einen ganz erheblichen Einfluss hat.
VG, Wolfgang
Hallo @Wolfgang,
Warum ich das hier schreibe, ist eine Tatsache die auch schon Frank ( Betrag Juni 25, 2024 ) erwähnt wurde. An dieser hochfrequenten Restwelligkeit scheitern viel Projekte. Bzw. als ergänzender Hinweis zu Manuells Beitrag vom 15.Feb.2024.
Ich will hier keine Datenblätter einstellen, weil diese sich jeder beim Hersteller Downloaden kann. Aber schau dir mal Beispielsweise, und stellvertretend den MCOP1802 an. Bei einer IOut von 25 mA hat dieser LDO nur einen Drop von 18mV ! Damit muss man besonders bei Mobilen Anwendungen mit einem Akku ( gleich welcher Nennspannung ) nicht mehr herum feilschen. Das gleiche würde auch einen deiner neusten Beiträge zu den LoRaWAN HC-14 Modulen betreffen. Hier hast du eine N-Chanel MOSFET verwendet um eine Unterbrechung in der GND Leitung des Moduls herbeizuführen.
Eigentlich schalten man wirklich das Plus-Potential, was einen P-Chanel MOSFET veraussetzen würde, und somit die Ansteuerung erschweren. Also warum auch nicht an dieser Stelle ein solche schaltbaren LDO welcher via nicht invertierender Logik ( GPIO = LOW = Ausgang = LOW und umgekehrt ) genutzt werden kann die Source / Platine / Modul komplett und potentialfrei stromlos zu machen ?
Selbst bei größeren Lasten MCP1726 (1 A) MCP1727 (1,5 A) kann man viel bequemer und auch einfach anzusteuern dieser SHDN gezielt dazu nutzen, einzelne Verbraucher oder Verbrauchergruppen Spannungsfrei zu schalten, oder auch bei Sensorausfällen via des OneWire Busses ( Stichwort DS18B20) kann man einen solchen LDO in seiner Kombination als Spannungsquelle mit einer hohen Stabilität und Genauigkeit, sowie dem Schaltverhalten /-vermögen dazu nutzen mittels ON/OFF Schaltfunktionen absolut Lastfrei ( SHDN IIn 3 µA ) umzusetzen. Was bedeutet der schaltende GPIO ist weniger belastet, wie bei fast jedem anderen Ansteuerungsversuch ( Ausnahme dedizierte Gatetreiber ).
Wenn man sich also nur das Ganze mal in der Gesamtheit eine Schaltung und auch bezogen auf den partiellen Stromverbrauch einzelner Bereich genauer betrachtet, kann man mittels dieser speziellen LDO’s nicht nur den Gesamtstromverbrauch massiv reduzieren, auch die Belastung einzelner GPIOs wie bzw. bei einer direkten Ansteuerung nur mittels eines Gate-Vorwiderstandes wird deutlich reduziert. Je nach Anzahl der Abschaltvorgänge pro Zeiteinheit erzielt man damit sogar eine realistische Laufzeitverlängerung bei Mobilen Anwendungen wo die Akku Kapazität immer der Knackpunkt ist.
Ja, das kann ich bestätigen. Aber warum stellt das Modul die Arbeit ein, wenn ich die Massen der Schaltungen verbinde?
Übrigens der reine Festmagnet des Lautsprechers stört nicht. Erst wenn die Schaltung (Netzteil, Arduino, Display-, mp3- und Verstärkermodul unter Spannung gesetzt wird tritt das auf.
Dafür habe ich leider keine wirklich gute Erklärung. Dass der Lautsprecher nur stört, wenn er in Betrieb ist, macht Sinn.
Hallo Wolfgang,
nach vielem hin und her mit diesen ganzen Funkuhrmodulen bin ich auf Modul gestoßen, welches sich durch eine Besonderheit hervorhebt, welches so kein anderes Modul im Funktionsumfang mitbringt. Es ist eine automatische Gain Anpassung, um bei äußeren Störungen, oder Empfangsgebieten mit sehr schwachen Signaleingang nach meinen bisherigen Erfahrungen eine sehr gute und schnelle Synchronisation bietet.
Dieses Modul eines Kanadischen Herstellers -> https://www.amazon.de/CANADUINO-Atomuhr-AM-Empf%C3%A4nger-ADK-5kHz/dp/B01KH439ZG
biettet sowohl einen positiven, wie auch invertierten Signalausgang an,man kann es schlafen legen, aber auch via eines Auto-Gains sich eigenständig den Umgebungsbedingungen anzupassen.
Zwar muss man in diese Platine noch das passende Quarz selber einlöten, aber selbst in Ecken mit extrem schlechten Empfangsbedingungen und zum Teil in Kellern funktioniert dieses Modul einwandfrei. Ich musste bisher nie länger als 2 Minuten unabhängig des Standortes auf eine vollständige Synchronisation warten.
Hi, vielen Dank. Das sieht vielversprechend aus. Leider nicht mehr verfügbar bei Amazon, auch bei eBay gab’s das mal, aber zumindest im Moment nicht mehr. Ich habe das Teil in Kanada bestellt: https://universal-solder.ca/product/dcf77-empfanger-funkuhr-receiver/ . 11 USD und ungefähr dasselbe für Versand -> 19,88 Euro. Schaun wir mal…
Vielen Dank noch einmal. Ich habe mir das Modul mittlerweile und erstaunlich schnell aus Kanada erhalten und ich muss sagen, ich bin begeistert. Die Signalqualität ist viel stabiler als die aller anderen Module, die ich getestet habe. Und das auch an Orten, wo andere Module aufgegeben haben. Ich habe es in den Beitrag aufgenommen.
VG, Wolfgang
Herzlichen Dank, ich verstehe im Ansatz was passiert.
Wenn ich jetzt aber die Zeit sekündlich ausgeben möchte, wie mache ich das? Das Delay von 3000 ms auf 1000 ms verkürzen funktioniert nicht. Ich denke mal wegen der 1500ms Low-Phase, richtig?
Herzlichen Gruß
Das müsste auch sekündlich gehen. Ich weiß nicht mehr, warum ich drei Sekunden gewählt habe. Ich glaube, damit die Ausgabe nicht zu hektisch ist. Probiere es einfach aus! Und genau, einfach das Delay variieren. Viel Erfolg!
Das habe ich gemacht und eben genau das festgestellt. Verändere ich auf 1000 ms, synchronisiert sich nichts. 🙁
Mein plan war nämlich die Ausgabe auf ein LCD Display. Funktioniert bei 3000, nicht aber bei 1000
Ich habe das DCF77 Modul noch einmal aus der Schublade geholt und die Ausgabe im Sekundentakt probiert, also mit delay(1000) im loop. Das funktioniert bei mir sowohl mit dcf77_softRTC.ino als auch mit dcf77_softRTC_without_interrupt.ino. Also ist die Frage, was bei dir anders ist. Du sagst, du nutzt ein LCD-Display. Funktioniert die sekündliche Ausgabe nur nicht bei Benutzung des LCDs oder funktioniert auch die sekündliche Ausgabe auf dem seriellen Monitor nicht? Mit anderen Worten: Wenn du beispielsweise den Sketch dcf77_softRTC.ino nimmst und nicht anderes änderst als delay(3000) zu delay(1000), geht es dann? Wenn nein, dann wird es schwierig, wenn ja, dann müssen wir mal schauen inwiefern die LCD Ansteuerung die Ansteuerung des DCF77 stören kann.
VG, Wolfgang
Nach vielem Rumprobieren und Verzweifeln komme ich zu dem Entschluss: Das war wahrscheinlich doch nicht der Grund, stimmt. Insgesamt funktioniert das bei mir leider sehr unzuverlässig (mal geht´s, dann wieder nicht). Im Moment habe ich tatsächlich auch den Verdacht, dass nicht sauber unterschieden und deshalb nicht synchronisiert werden kann.
Der Arduino soll nämlich parallel auch noch das Signal eines Bewegungsmelders verarbeiten und Audioausgaben über ein serielles MP3 Modul machen. Vielleicht stört das alles doch zu sehr!?
Ich habe etwas über eine analogComp Bibliothek gelesen. Leider verstehe ich das alles noch zu wenig um die zu implementieren und den Code anzupassen. 🙁
Weitere Tests: Der Sketch läuft… meistens… allerdings synchronisiert der DCF77 Empfänger nur, wenn ich am USB meines Rechners bin. Sobald ich ein Steckernetzteil vom Handy nehme, wird nichts mehr synchronisiert. Sollte die Stromaufnahme von einem Arduino Nano, einem HD 44780 Display und einem seriellen HW 311 mp3-Modul tatsächlich so hoch sein, dass der Empfänger nicht sauber arbeiten kann?
Danke und viele Grüße
Manuel
Das kann ich mir nicht wirklich erklären. Ladestecker für Smartphones haben in der Regel mehr Power als ein PC-USB-Anschluss. Schwierig, das alles aus der Ferne zu beurteilen. Vielleicht fällt mir ja noch etwas ein, dann melde ich mich.
VG, Wolfgang
Hi,
könnte es etwas mit dem GND zu tun haben, also dem Gegenpol zur Antenne?
Gruß André
Ja, die „können“ sicher aber regelt nicht eine Elektronik darin den Ladestrom?
Ja das tut sie. Sie merkt wenn der Akku sich füllt. Man kann ein Ladegerät aber auch zur Stromversorgung nutzen. Ich habe es eben ausprobiert: mit meinem Samsung Ladestecker kann ich einen Arduino Nano, an dem ein DCF77 hängt, betreiben und es klappt mit der Akualisierung. Was ich festgestellt habe, ist dass die Qualität der DCF77 Module schon recht unterschiedlich ist. Und ich habe festgestellt, dass der Empfang davon abhängig ist, wo ich die Antenne positioniere.
Ja, wirklich seltsam. Ich habe es mit 3 unterschiedlichen Ladegeräten versucht. Den Arduino und den DCF-Empfänger habe ich nicht bewegt, ich habe nur das USB-Kabel umgesteckt. Bei allen Ladegeräten keine synchronisation, beim Computer-USB ging es jedes Mal.
Der Empfänger ist übrigens der von Pollin.
Danke und herzlichen Gruß
Hallo Manuel, ich habe einen neuen Kommentar eröffnet – s.o.!
Hallo Wolfgang,
zunächst vielen Dank für deine vielen tollen Beiträge. Für mich als Elektronik-Newbie ist deine Website eine unglaubliche Quelle an nützlichen Informationen und Inspirationen für meine ‚Basteleien‘.
Dank deiner Beschreibungen und des Codes habe ich mein DCF77-Modul ohne größere Probleme auslesen können. Über die RTCLib werden die Werte in einen einzigen Ausgabewert umgewandelt, den ich in 74HC595 Shift-Register schiebe. Von dort werden sie über 74LS138 8-Channel De-Multiplier und CMOS4543 BCD-to-7-Segment auf LED-Displays ausgegeben. Funktioniert alles soweit prima, nach etwas mehr als zwei Minuten werden Zeit und Datum korrekt angezeigt. Danke deines Beitrags über ATtiny-Programmierung nun auch ohne Arduino. Dennoch: eine Menge ICs und Kabel. Um das Projekt übersichtlicher zu gestalten, habe ich versucht die Ausgabe auf einem 2×16 LCD (mit I²C-Schnittstelle) darzustellen. Prinzipiell funktioniert die Darstellung, nur Zeit und Datum kann der Arduino-Sketch anscheinend nicht mehr verarbeiten oder zeitgerecht (?) einbinden. Es scheint, als wenn die Ausgabe über die I²C-Schnittstelle sehr langsam ist, und vielleicht kollidieren für die internen Routinen für den Datentransfer über SCL und SDA mit dem Interrupt für das DCF-Modul? Eine Ausgabe von Zeit und Datum benötigt knapp 120ms. Nachdem ich die Anzeige nur verändere, wenn sich die Zeit tatsächlich ändert, konnte ich so die benötigte Zeit für den Schleifendurchlauf auf etwa 2ms drücken, jedoch wird jede Sekunde natürlich einmal das Display aktualisiert, also wieder 120ms. Mit dieser Modifikation scheint der Arduino jedoch zumindest irgendwelche Daten zu verarbeiten, allerdings erscheinen Zeit und Datum mit rein zufälligen Werten. Hast du eventuelle irgendwelche Empfehlungen für mich?
Vielen Dank und viele Grüße
Matthias
Hallo Matthias,
so auf die Ferne eine gewisse Herausforderung. So aus dem Stand kann ich nicht sicher sagen, woran es liegt. Interrupts sind allerdings immer gut für unerwartete, komplexe Fehler. Mir sticht aber auch in Auge, dass eine Displayaktualisierung 120 ms benötigt, das ist wirklich lang.
Ein paar Fragen / Ideen:
1) Lass das DCF77Modul mal ganz außen vor, indem du im Sketch die Interrupts abschaltest bzw. gar nicht erst aktivierst. Stelle die SoftRTC im Setup auf die Kompilierungszeit oder lege einfach irgendeine Zeit fest. Bekommst du dann vernünftige Ausgaben? Falls ja, dann ist zumindest bestätigt, dass die Programmteile für den DCF77 verantwortlich sind. Falls nein, dann liegt das Problem woanders.
2) Die I2C Geschwindigkeit lässt sich mit Wire.setClock(clockFrequency) einstellen. Voreinstellung ist 100 kHz. Vielleicht lässt das Display 400 kHz zu? Probiere einfach mal Wire.setClock(400000) irgendwo ins Setup hinter Wire.begin(), vielleicht mit einem delay dazwischen (100 ms).
3) Vielleicht kann ich auch etwas aus den willkürlichen Daten lesen, die dir angezeigt werden. Kannst du mir mal ein paar Werte nennen, die hintereinander angezeigt wurden?
4) Ich würde mir gerne mal deinen ganzen Sketch anschauen. Zum Nachbauen und Ausprobieren fehlt mir die Zeit, aber vielleicht sehe ich ja was.
5) Welchen ATtiny verwendest du?
Da das Ganze jetzt etwas speziell wird und die Möglichkeiten in den Kommentarfeldern begrenzt sind, schlage ich vor, dass wir auf E-Mail umsteigen. Bitte schreibe an wolfgang.ewald@wolles-elektronikkiste.de.
VG, Wolfgang
Das liest sich sehr ähnlich zu meinem Problem, wenn ich das richtig verstehe.
Hallo Manuel,
Das Problem rührt von den Netzteilen. Je nachdem, wie sie die Versorgungsspannung für den Verbraucher herstellen, sorgen sie Netzteile für Interferenzen.
Ich kann so bewirken, dass auch kein Signal empfangen wird.
Aus diesem Grund gehe ich nur über Akkus, da sie eine störungsfreie Stromquelle darstellen.
Hallo Wolfgang,
ich bin einmal mehr bei meinen „Basteleien“ auf deine Seite gestoßen. Wir hatten schon einmal wegen des Bootloaders Kontakt 😉 Danke für diesen schön erklärten Beitrag!
Ein kleiner Nachtrag zu deinen Modulen. Die meisten DCF-Moduln, die jetzt (noch) angeboten werden, sind nicht „unempfindlich“, sondern werden am ARDUINO (selbst mit 3,3 V) an der Grenze betrieben. Sie sind eigentlich dafür ausgelegt, dass sie nicht einer Mignonzelle (1,5 V) betrieben werden. Dem zur Folge ist auch ihr Ausgang auf diese Spannung ausgelegt. So auch das Modul von Pollin
https://www.pollin.de/p/dcf-77-empfangsmodul-dcf1-810054
Bei diesem Modul und bei ziemlich vielen weiteren Moduln gibt es zusätzlich noch das Problem, dass der Signalausgang „hochohmig“ ist und durch den ARDUINO-Eingang sehr stark belastet wird, so dass vielfach ein Dekodieren des Signals nicht möglich ist.
Es gibt einen Bausatz, der auch dieses Problem „umschifft“
https://www.aatis.de/content/bausatz/AS732_DCF77-RX-Antenne
Hier wird für das Pollin-Modul ein zusätzlicher Verstärker angeboten, der inkl. Modul, Verstärker und Gehäuse noch günstiger ist als das Modul von reichelt 😉
Für den Bastler und Experimentierer ist dieser Bausatz ideal, da er direkt an den 5V- Arduino anzuschließen ist.
Vielleicht ist dies noch für dich oder deine Leser interessant.
Liebe Grüße
Mathias
Hallo Mathias,
danke für den Hinweis. Es gibt da durchaus Unterschiede (wie ich auch im Beitrag schrieb). Eine Module sind direkt ausdrücklich bis 5 Volt betreibbar, wie z.B. dieses hier:
https://www.reichelt.de/dcf-77-empfaengermodul-dcf77-modul-p57772.html
Andere vertragen höchsten 3.3 oder 3.6 Volt, wieder andere sogar noch weniger. Und leider gibt es oftmals gar keine Angabe, was sehr ärgerlich ist.
VG, Wolfgang
Hallo, ich habe das Dcf77 Modul aus einen alten Wecker ausgebaut. Das Modul läuft auf 3Volt. Am Datenausgang, open collektor, kommt ein Pullup Widerstand von ca. 20 K Ohm. Das Signal ist so aber zu schwach.,daher habe ich einen Transistor in Kollektorschaltung nachgeschaltet. Dieser liefert als Impedanzwandler ein stabiles Signal von weniger als einen Volt. Ein weiterer Transistor, mit einer Kollektorspannung von 5 Volt (vom Arduino gespeist) , hebt den Pegel auf einen ausreichendenden Pegel(60% VCC). Diese Schaltung läuft bei mir stabil. Eine LED zeigt das Signal ein. Durch diese Schaltung wird das Signal nicht invertiert. Nun geht es bei mir an das Decodieren. Der Empfänger ist bisher sofort nach dem Einschalten synchron. Der PON ist erstmal bei mir auf Masse. Er kann zum Ausschalten des Module über einen weiteren Transistor und einem Spannungsteiler (5Volt zu 3Volt)auf high gezogen werden. Grüße aus Hamburg
Schön gelöst – vielen Dank und Grüße in den hohen Norden!
Hi, super erklärt und sehr sauber dokumentiert. Ich habe sehr viel gelernt mit deinem Modul. Ich hab hier ein paar Uhren, die leider wegen der nicht anders zu lösenden positioierung das Signal nicht richtig empfagen. Daher werde ich wohl ein NTCtoDCF Modul bauen und kann deine Software sehr gut zum Testen verwenden.
Übrigens, wenn man ein Modil von ELV verwednet und es mittels PullUp Widerstand an den Arduino anschließt funktioniert die Erkennung ob der Interrupt aktiv ist nur mit einer Negierung der Abfrage also mit:
if(!digitalRead(interruptPin)){
….
}
Nur falls noch jemand das gleiche Phänomen hat.
Gruß Michael
Danke für den Tipp und natürlich für das Feedback!
Hallo Wolfgang,
die Sketche laufen perfect. Ich habe mir damit eine Funkuhr gebaut die neben Uhrzeit und Datum auch die Wochentage per LED anzeigt. Und jeweils zur vollen Stunde per JQ6500 Soundmodul das Horn der AIDASol erklingen läßt. Nachts natürlich nicht 😉 Leider kann ich hier ja kein Foto anhängen …
Ich habe nun versucht „SoftRTC“ durch den DS3231-Baustein zu ersetzen und im Sketch „RTC_Millis“ durch „RTC_DS3231“ ausgetauscht. Bei mir funktioniert das aber nicht, der Serial-Monitor-Schirm bleibt leer. Woran könnte es liegen?
Vielen Dank und viele Grüße
Hallo Michael,
ich denke, ich muss mal den ganzen Sketch sehen sonst kann ich nur spekulieren. Du kannst ihn an wolfgang.ewald@wolles-elektronikkiste.de senden. Und vielleicht auch das Foto?!
VG, Wolfgang
Hallo Michael,
danke für das Foto. Im Sketch fehlt ganz einfach ein „rtc.begin()“. Ich habe gerade nicht die Zeit alles zusammenzustecken und auszuprobieren. Probier mal selbst und melde dich, wenn es noch nicht funktioniert.
…. und deine Uhr ist sehr sehenswert! Danke für das Foto.
VG, Wolfgang
Hallo Wolfgang,
muss man in der Ausgaberoutine den 64bit Wert für currentBuf nicht um 32 bit nach rechts schieben, um die oberen 32 Bit zu bekommen? Du schiebst hier nur um 16 Bit.
Hallo Peter,
ups! Stimmt – komisch, dass es noch keinem aufgefallen ist. Wahrscheinlich, weil nichts damit gemacht wird, sondern nur zur Info ausgegeben wird. Vielen Dank! Werde es gleich ändern.
VG, Wolfgang
Hallo Wolfgang,
Das von dir gezeigte DCF77 Modil kleiner Bauart, mit dem du weniger Erfolge erzieht hast, ist nehme ich an von dem Elektronik-Versender Reichelt. -> https://www.reichelt.de/index.html?ACTION=7&LA=3&OPEN=0&INDEX=0&FILENAME=C300%2FSPEZIFIKATIONF.NR.9500511.pdf
Wohl dieses ?
Das Modul ist sehr klein, aber auch sehr empfindlich, was die Restwelligkeit der Versorgungsspannung angeht.
Wenn man das in den Griff bekommen hat, nicht mit einem Festspannungsregler wie 2950 oder LM78x, funktioniert es in einem sehr breiten Spannungsbereich von 1,2 Volt bis 5,0 Volt.
Ich habe dazu eine Referenzspannungsquelle MCP1501-3302 ( 3,3 Volt Variante ) mißbraucht.
Dann gibt das Modul keinen wirklich sauberes LOw-High Signal aus. Dem kommt man nur mit einem OPV oder einem Komparator bei. Am besten dafür eigenen sich Rail-to-Rail-OPVs die als Window-Komparator beschaltet sind, und den man die Schaltschwelle entsprechend der Vc auf den unteren Wert der HIGH-Pegels einstellt.
Ansonsten super Beitrag und viele wertvolle Tipps
Hallo, vielen Dank. Ich bin immer froh über solche konkreten Hinweise. Das Modul habe ich in „Amazonien“ gekauft, aber ich gehe auch davon aus, dass es mit dem Reichelt-Teil identisch ist. Kommt wahrscheinlich alles aus einer Fabrik.
Hallo Wolfgang, ich finde deinen Beitrag sehr interessant aber an einem Punkt komm‘ ich nicht weiter.
Mir fehlt diese Bibliothek: #include
Du hast geschrieben, dass sie zur Arduino Grundaustattung gehört. Ich verwende die neueste IDE 1.8.19
aber da konnte ich sie nicht finden. Wo bekomme ich diese Bibliothek/Datei her?
auf https://github.com/omnidan/ArduinoPure/blob/master/tools/avr/lib/avr/include/util/parity.h
sehe ich sie nur als Text-Datei. Kannst du mir da weiter helfen?
LG Andre
Hallo Andre, wahrscheinlich verwendest du keinen AVR Microcontroller (Arduino UNO, Nano, usw.), richtig? Ich habe nicht bedacht, dass die AVR Bibliotheken, von den utils/parity.h ein Teil ist, nicht eingebunden werden, wenn man einen anderen Mikrocontroller verwendet. Nachträgliches, manuelles Einbinden nützt nichts, da die Funktion in Maschinencode geschrieben ist, also hardwarespezifisch.
Darf ich dich als Versuchskaninchen missbrauchen? Bitte lasse den include-Befehl weg und füge die folgende Funktion am Ende des Sketches hinzu:
bool parity_even_bit(byte val){
val ^= val >> 4;
val ^= val >> 2;
val ^= val >> 1;
val &= 0x01;
return val;
}
Das ist der Ersatz für die Funktion. Geht es?
VG, Wolfgang
Ich habe es selbst ausprobiert und es funktioniert. Die Ersatzfunktion ist jetzt in den Beispielsketchen integriert und muss nur entkommentiert werden. Die include Anweisung für parity.h muss entsprechend gelöscht oder auskommentiert werden.
Wenn der gcc Compiler verwendet wird (was bei der Arduino IDE wohl der Fall ist), kann man auch die inkludieren und die Funktionen „__builtin_parity()“ und/oder „__builtin_parityl()“ verwenden. Letztere Funktion hat den Charme, dass sie 32 Bit „verkraftet“ und man somit die Parität des Datums in einem Rutsch berechnen kann z.B.:
if ( (__builtin_parity(dcf77Seq->minutes) == dcf77Seq->parityBitMinutes) &&
(__builtin_parity(dcf77Seq->hours) == dcf77Seq->parityBitHours) ) {
dcf77Seq->parityTimeOK = true;
}
if(__builtin_parityl((isr_dcf77DataBuffer >> 36) &0x3FFFFF) == dcf77Seq->parityBitDate ) {
dcf77Seq->parityDateOK = true;
}
Ich verwende das so bei einem Versuchsaufbau mit einem Arduino Nano Clone.
Was ich aber noch los werden möchte: Dein Blog ist sehr gut gemacht und lehrreich. Mach weiter so 😉 *thumbup*
Gruß Kai
irgendwie ist „die stdlib.h inkludieren“ im Text verschwunden. Wahrscheinlich, weil ich das in spitzen Klammern geschrieben habe.
Hallo Wolfgang,
vielen Dank für Deine tolle Seite und die ausführlichen Erklärungen. Da gibt es auf einen Schlag Dutzende Tipps!
Ich nutze das Modul von Pollin-Electronic, alle Sketche haben auf Anhieb funktioniert. Der Empfang ist Tag und Nacht stabil (Standort Schleswig-Holstein). Macht Spaß ….
Vielen Dank für das Feedback! Freut mich!
Hallo Wolfgang,
vielen Dank für deine Mühe mit dieser Seite. Ich konnte mein DCF77-Modul mit deiner Software sofort in Betrieb nehmen. Es hat alles funktioniert wie beschrieben.
Leider kursieren im Internet viele fehlerhafte Anleitungen.
Viele Grüße,
Bernd.
Das freut mich. Danke für das Feedback!
Hallo,
endlich habe ich eine Seite gefunden, mit deren Hilfe ich mein DCF77 Modul in Betrieb nehmen konnte.
Vielen Dank für die sehr übersichtlichen Erklärungen und Beispielsketche.
Ich habe schon Dutzende Seiten durch, aber nun ist es mir erstmal gelungen, das aktuelle Datum und die Zeit zu bekommen.
Ok, zugegeben, im Zimmer, mit mehreren PCs und Monitoren ist es schwierig und nicht zuletzt hängt es ja auch von der Qualität der Antenne und des Empfängers ab,
Sobald meine Monitore laufen, ist der Empfang quasi nicht mehr möglich, aber ich hatte ohnehin nur vor, meine Uhr 1x in der Nacht zu synchronisieren, was, wie ich denke, völlig ausreichend ist.
Ich bin mal gespannt, wie der fertige Aufbau nachher laufen wird.
Viele Grüße und schon mal ein schönes Weihnachtsfest,
Andreas.
Hallo Andreas,
danke für’s Feedback. Hätte ich nicht gedacht, dass PCs und Monitore den Empfang so stören. Auf jeden Fall ein wertvoller Hinweis. Die auch ein schönes Weihnachtsfest!
VG, Wolfgang
Sei gegrüßt, Wolfgang.
Ein kleines Feedback zu meiner noch im Bau befindlichen Uhr.
Ich habe die Empfangseigenschaften etwas verbessern können, indem ich die Antenne (Ferritkern) über ein ca. 0.5m langes, abgeschirmtes Kabel an das DCF Mudul (das erste Bild hier, ganz oben) angeschlossen habe. Die Masse des Kabels habe ich einseitig mit Masse des DCF Moduls verbunden, um Einstreuungen zu vermindern.
Zusätzlich habe ich direkt an den Lötaugen der Spannungsversorgung des Moduls noch einen 0.1uF Kondensator angelötet.
Ich hatte u.A. festgestellt, dass in der Nähe des Arduino NANO, der über einen Stepup Spannungswandler von einem 3.7V Akku versorgt wird, wohl auch ganz „wilde“ Schwingungen auftreten müssen und der Empfang daher fast unmöglich war.
Als meine Schaltung noch ohne Stepup Regler auf einem Breadboard lief, trat dies nämlich nicht auf.
Außerdem habe ich an der USB Buchse, über die später auch der Akku geladen wird, ebenfalls einen 0.1uF Kondensator angelötet, da die Spannung aus PC entgegen allen Erwartungen eher „unsauber“ zu sein scheint.
Grüße,
Andreas
Hallo Wolfgang,
erst einmal ein Lob auf diese gelungene Website. Ich konnte mir schon einige wichtige Anregungen holen. Mein DCF77-Modul weigert sich bislang aber, mir eine korrekte Zeitangabe zu machen. Ich verwende ein Modul wie das auf Deinem ersten Bild mit zwei P-Anschlüssen, verbunden habe ich nur den ersten an Pin 2:
Das erste Testprogramm lässt bereits nach wenigen Sekunden die LED blinken. Doch schon bei der sequence-evaluation erhalte ich nur Listen von Wertepaaren, die bis 255 hochgezählt werden und dann wieder bei 0 beginnen. Der zweite Wert bewegt sich in einer Größenordnung <250.
Verwende ich die letzten beiden Sketche wird beim vorletzten nur die Zeit seit dem 01.01.2000 hochgezählt, beim letzten erscheint nur der Hinweis, dass auf den Beginn der Sequenz gewartet wird.
Das Modul steht im ersten Stock vor einem Fenster, die Antenne ist senkrecht aufgestellt, was die Schnelligkeit des Empfangs deutlich erhöht hat.
Was kann ich noch tun, um ein gültiges Zeitsignal zu erhalten?
Danke vorab,
Thomas
Hallo Thomas, tut mir leid, dass es nicht funktioniert. Auf die Ferne ist es immer schwer Fehler zu finden. Immerhin blinkt es schon mal, dass ist ja ein Anfang. Wenn die Wertepaare bis 255 hochzählen, zeigt das, dass das lange Minutensignal nach Bit 58 nicht gefunden wird. Da der Zähler als Byte definiert ist, ist das dann nur folgerichtig. Kommen die Wertepaare denn im Sekundentakt? Wenn ja, ist das das nächste gute Zeichen. Und wie sehen die Wertepaare aus. Wenn ich das richtig verstanden habe liegt der zweite Wert immer irgendwo kleiner 250? Wie sehen denn die ersten Werte aus? Hast du vielleicht eines der Module, die ein umgedrehtes Signal abgeben, also kurzes Low und langes High? Das bekommt man ja leicht heraus. Wenn das der Fall ist, müsstest du die High / Low Logik in den Sketchen umdrehen oder das Signal invertieren. Letztere habe ich hier beschrieben:
https://wolles-elektronikkiste.de/ltc6995-long-timer-low-frequency-oscillator#Power-On-Reset
Dem Link folgen und ein wenig herunterscrollen.
VG, Wolfgang
Sehr schöner Beitrag. Ich möchte nur eine Sache noch hinzugeben:
Der Ausgang der DCF77 Module ist wohl in der Regel ein OpenCollector Ausgang. Das heißt man muss für einen uC den internen PULLUP aktivieren oder einen externen PULLUP Widerstand nutzen. Möglichst keinen zu „steifen/niederohmigen“ PULLUP, da der Ausgangsstrom des Signals sonst nicht reicht ihn auf Masse zu ziehen.
Ich kann mein DCF Modul (von ELV) problemlos am Arduino UNO auslesen, aber nur, wenn ich den internen PULLUP einschalte. Eine Verstärkerschaltung für das Signal (und diese Ansicht haben glaube ich viele) ist in der Regel nicht nötig, da der CMOS Input eines uC viele MOhm hat und die Signalquelle nicht stark belastet.
Vielen Dank für den Hinweis!
Hallo Wolfgang,
wirklich gute Rutinen für DCF77!!
Ich habe deinen Code mit RTC_DS3231 statt RTC_MILLIS versucht, das brachte das Programm zu HUNG beim Übertrag der DCF Zeit zur I2C_RTC in der ISR.
Die Lösung war das setzen der RTC aus der ISR in die Main LOOP zu verlegen.
Die dazu nötigen Anpassungen waren: Variablen aus der ISR als volatile im Header zu definieren und anstatt des rtc.adjust(DateTime… in der ISR, einen Flag zu setzen. Das rtc.adjust(DateTime… in die Main verlegen … Flag reset und fertig.
Hardware: LGT8F328P-LQFP32 MiniEVB + DCF77 Pollin
PS: rtc.begin() nicht vergessen…
Vielen Dank!
Hallo Wolfgang,
super Beitrag!!!
Kannst Du bitte Sagen, wo Du Dein Modul gekauft hast. Ich hatte mit zwei Modulen (ähnlich deinem zweiten Modul) große Empfangsprobleme.
Als Hilfe hatte ich einen Artikel in der HEISE MAKE.
Ich habe es dann gelassen und einen ESP_32 per ntp synchronisiert.
Gruß Harald!
Hallo Harald,
das Teil ist von Amazon:
https://www.amazon.de/Unbekannt-Empfangsmodul-Funkzeit-Funkuhr-Frankfurt/dp/B07RRXRY36/ref=mp_s_a_1_5?dchild=1&keywords=dcf77&qid=1613815244&sprefix=dcf&sr=8-5
Sporadisch habe ich damit auch mal Empfangsstörungen, aber im großen und ganzen bin ich zufrieden. Hängt nicht nur vom Modul ab. Manchmal nützt es schon, die Antenne anders auszurichten und sie von Störfaktoren wie elektrischen Geräten und Kabeln fernzuhalten.
VG , Wolfgang
Sehr toller Bericht und sehr interssante Infurmationen zur Funktion der Funkuhr Übertragung
Weiter so Wolfgang
Vielen Dank!
Hallo Wolfgang,
toller Beitrag!
Frage wie wäre es wenn du mit dem Interupt nur ein Flag setzt, und dann mit dem Flag die ISR als funktion in der loop() ausführst?
Würde es dann damit dann auch funktionieren?
viele Grüße
Frank
Ja, das geht auch. Man darf dann nur nicht zu viel anderes in der loop() machen, was die Auswertung zu sehr verzögert. Solange man sicherstellen kann, dass man den Flag nach sagen wir mal nach spätestens einer hundertstel Sekunde behandelt, würde das gehen. Normalerweise bin ich auch eher ein Freund einer solchen Vorgehensweise.
Ich habe das mal zu einer Zeit, als es noch keine Arduino und kein C für die Megas gab in Assemler
programmiert.
Ein anderes , auch sehr effizientes Prinzip:
Über einen Timer -Interrupt werden alle z.b. 5 ms Zeitscheiben-Unterprogramme aufgerufen.
Eines zählt die Aufrufe bis zum Wechsel am Eingang, speichert jew. ‚1‘ oder ‚0‘ , bei Pause >100 ms wird dann ausgewertet.
Zur Datensicherung bei der Übertragung werden zwei aufeinander folgende Zeiten verglichen, die dürfen sich dann nur um 1 Minute unterscheiden. Der Einfachheit halber dürfen sich die Werte für Tag, WTag, Jahr etc gar nicht unterscheiden.
Das Zeitscheiben – Verfahren lässt eine grosse Zahl gleichzeitig ablaufender Prozesse zu.
In den Üblichen Steuerungen mit Mega168 ff laufen Scheiben mit 0,125 , 1, 5, 20, 100 ms und etwa 100 unabhängige Prozesse, viele davon natürlich nur in der 20 oder 100 ms Schleife.
Empfehle sehr, das mal zu probieren. Die Module von Conrad damals haben sehr gut funktioniert,
5 V- Betrieb und Transistor-Ausgang.
Vielen Dank, schlauer Ansatz!