
Über den Beitrag
Im dritten und letzten Teil dieser Beitragsreihe kommen wir zu den Timer Interrupts. Da Timer Interrupts ausgesprochen hardwarespezifisch sind, werde ich ihre Anwendung auf verschiedenen Mikrocontrollern erklären, und zwar dem ATmega328P / LGT8F328P, der ATtinyx5-Serie, dem ESP8266 und dem ESP32.
Timer Interrupts werden häufig verwendet, um PWM Signale zu erzeugen. In diesem Beitrag geht es aber nur um die Nutzung der Timer Interrupts für andere Zwecke. PWM mit dem ATmega328P habe ich schon einmal separat in einem zweiteiligen Beitrag behandelt (Teil 1 und Teil 2).
Folgendes kommt auf euch zu:
- Was ist ein Timer Interrupt?
- Timer Interrupts der AVR-Mikrocontroller am Beispiel ATmega328P (Timer1)
- Timer Interrupts mit dem ATtiny85 / ATtiny45 / ATtiny25
- Timer Interrupts mit dem ESP32
- Timer Interrupts mit dem ESP8266
- MCU-übergreifende Timer-Bibliotheken
- Anhang – ICP1 als externen Interruptpin nutzen
Was ist ein Timer Interrupt?
Jeder Mikrocontroller besitzt Zählregister, die nichts anderes machen als stur hoch- oder herunterzuzählen, bis sie überlaufen oder einen definierten Wert erreicht haben, um dann wieder von vorn zu beginnen. Die Zählfrequenz entspricht dabei dem Systemtakt oder dem Systemtakt geteilt durch einen Vorteiler (Prescaler). Über den Zählerstand und die Taktfrequenz können wir Aussagen über die Zeit treffen. Damit wird der Zähler zu einem Zeitmessinstrument und heißt deswegen auch Timer Counter. Die Timer Counter verschiedener Mikrocontroller unterscheiden sich in ihrer Anzahl, ihrer Größe (z.B. 8, 16 oder 64 Bit) und der Auswahl der Prescaler.
Timer Interrupts können entweder für den Überlauf (Overflow) oder für das Erreichen eines Zielwertes (Compare Match) eingerichtet werden.
Wozu braucht man Timer Interrupts?
Wenn euer Mikrocontroller eine Aktion regelmäßig ausführen soll, dann ist es am einfachsten, das über delay() zu steuern. Diese Vorgehensweise lernt der Anfänger mit seinem ersten Blink-Sketch. Der Nachteil ist, dass delay() blockierend wirkt, d. h. der Mikrocontroller kann in der Wartezeit nichts anderes tun. Später lernt man dann, delay() zu vermeiden und durch millis()-Konstruktionen in dieser Art zu ersetzen:
if(millis() - lastAction > timeBetweenActions){
....
lastAction = millis();
}
Die millis()-Methode stellt aber nicht sicher, dass die Aktion exakt zum richtigen Zeitpunkt ausgeführt wird, da die if-Abfrage durch andere Vorgänge verzögert werden könnte. Hier kommen nun die Timer Interrupts ins Spiel, denn ihre Interrupt Service Routinen (ISR) unterbrechen das Programm und werden sofort ausgeführt. Zumindest gilt das, wenn sich das Programm nicht gerade einer noInterrupts()-Umgebung oder in einer anderen ISR befindet.
Auch, wenn es euch vielleicht nicht bewusst ist, habt ihr schon Timer Interrupts eingesetzt, beispielsweise beim Gebrauch von delay(), analogWrite(), bei der Steuerung von Servo-Motoren oder beim Einsatz der tone() Funktion.
Einige Mikrocontroller ermöglichen auch, Timer durch externe Signale hochzählen zu lassen. Das könnt ihr nutzen, um die Signale zu zählen oder um den Timer mit einer bestimmten Frequenz zählen zu lassen.
Timer Interrupts der AVR-Mikrocontroller am Beispiel ATmega328P (Timer1)
Der ATmega328P besitzt zwei 8-Bit Timer (Timer0 und Timer2) und einen 16-Bit Timer (Timer1). Der Timer0 kann in der Arduino-Umgebung nicht genutzt werden, da er für die Zeitmessung (delay() / millis()) benötigt wird.
Ich beschränke mich in diesem Beitrag auf den Timer1. Die Übertragung auf den Timer2 ist aber nicht schwierig (siehe z. B. hier).
Grundlagen – Registereinstellungen
Das Timer Counter Register für den Timer1 ist TCNT1. Wenn keine weiteren Einstellungen vorgenommen werden, zählt es brav im Systemtakt von 0 bis 216 – 1, also 65535.
Die Einstellungen für den Timer1 nehmt ihr in den beiden Timer1 Counter Control Registern TCCR1A und TCCR1B vor:


Die Compare Output Mode Bits COM1xy steuern den PWM Ausgabemodus. Das ist hier nicht Thema, also lassen wir die Bits ungesetzt. Ebenso wenig kümmern wir uns – im Moment – um ICNC1 (Input Capture Noise Canceller) und ICES1 (Input Capture Edge Select).
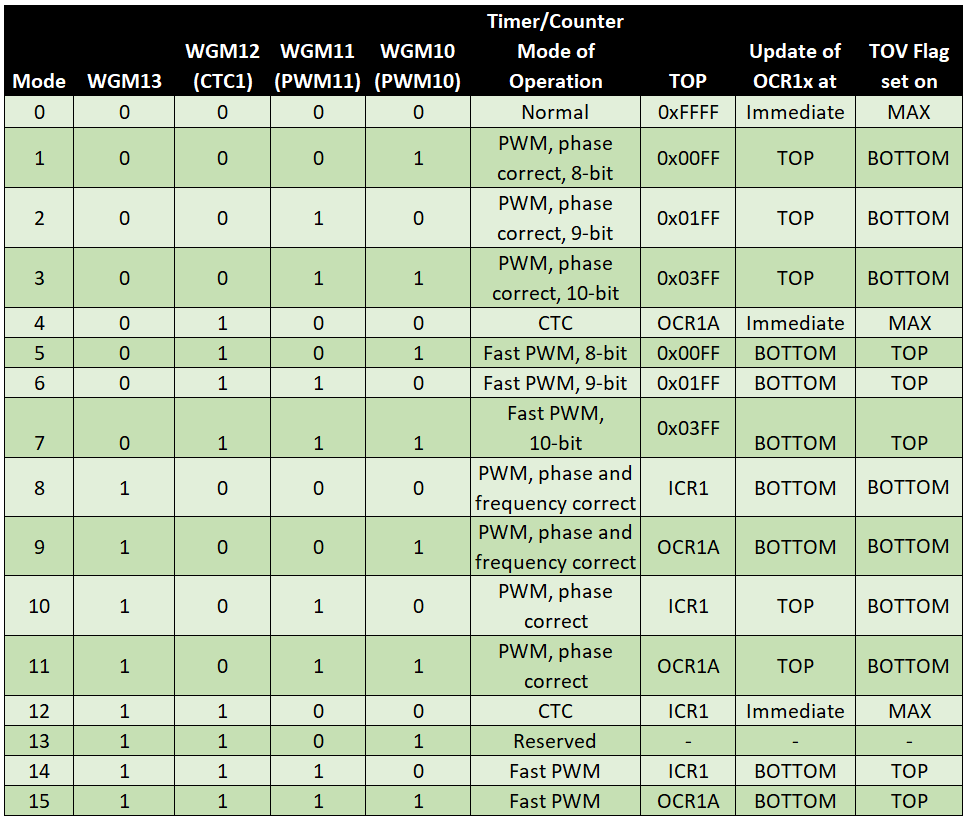
Die Wave Form Generator Mode Bits WGM1x legen den (PWM-)Modus fest. Es gibt 12 PWM-Modi und 3 Nicht-PWM Modi. Wir betrachten nur die Letzteren:
- Normal Mode 0: der Timer Counter zählt bis 216 – 1 = 65535.
- Um diesen Modus einzustellen, setzt ihr kein WGM1x Bit.
- Clear Timer on Compare (CTC) Mode 4: der Timer Counter zählt bis OCR1A (Output Compare Register A).
- Um diesen Modus einzustellen, setzt ihr WGM12.
- Clear Timer on Compare Mode 12: der Timer Counter zählt bis ICR1 (Input Capture Register 1). Um diesen Modus einzustellen, setzt ihr WGM12 und WGM13.
Für die vollständige Liste der Modi klickt hier: WGM1-Tabelle.
{kind=link}
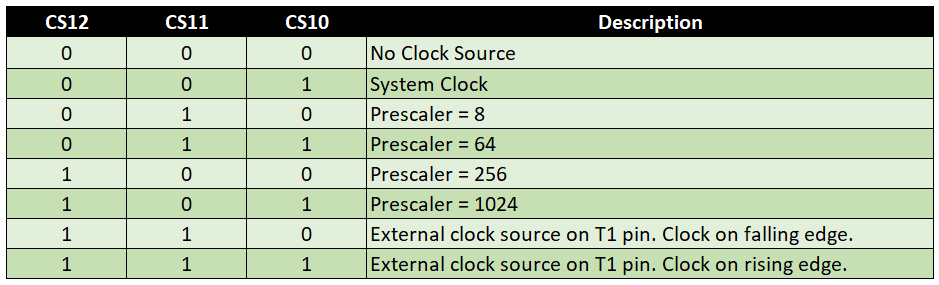
Um den Prescaler auszuwählen, setzt ihr die CS1x Bits nach folgendem Schema:
Schließlich aktiviert ihr noch die Timer Interrupts, die ihr nutzen wollt, im Timer1 Interrupt Mask Register TIMSK1.

- TOIE1: Timer Overflow Interrupt Enable – wird ausgelöst, wenn der Timer überläuft.
- OCIE1A: Output Compare A Match Interrupt Enable – wird ausgelöst, wenn der Timer Counter mit dem Wert in OCR1A (Output Compare Register A) übereinstimmt.
- OCIE1B: Output Compare B Match Interrupt Enable – wird ausgelöst, wenn der Timer Counter mit dem Wert in OCR1B (Output Compare Register B) übereinstimmt.
- ICIE1: Durch das Setzen des Input Capture Interrupt Enable Bit erreicht ihr, dass ein Interrupt ausgelöst wird, wenn ein Signal an ICP1 (PB0 / Pin 8) detektiert wird. Das eröffnet die Möglichkeit, ICP1 wie einen zusätzlichen externen Interruptpin zu nutzen (siehe Anhang).
Na, komplett verwirrt? Keine Sorge, mit den Beispielen sollte es klarer werden. Aber ein wenig Theorie fehlt noch.
Berechnung der Interruptfrequenz
Die Frequenz, in der das Timer Counter Register TCNT1 hochzählt, ist der Systemtakt, geteilt durch den Prescaler:
![\[ f_{TCNT1} = \frac{system\_clock}{prescaler} \]](https://wolles-elektronikkiste.de/wp-content/ql-cache/quicklatex.com-463a3b54af19b77d688ccbe2291a4d52_l3.png "Rendered by QuickLaTeX.com")
Der Maximalwert, bis zu dem der Timer hochzählt, wird als „Top“ bezeichnet. Im Normal Mode ist Top 65535. Da der Timer Counter bei 0 beginnt, sind das 65536 Schritte. Daraus folgt für die Überlauf-Frequenz:
![\[ f_{timer1\_overflow} = \frac{system\_clock}{65536\cdot prescaler} \]](https://wolles-elektronikkiste.de/wp-content/ql-cache/quicklatex.com-5699c16f3b15dd6a22f9f7bfb08603bb_l3.png "Rendered by QuickLaTeX.com")
Interrupt Frequenz im CTC Modus (4)
Im CTC Modus (4) ist Top gleich OCR1A. Entsprechend gilt für die Frequenz der Compare Matches:
![\[ f_{OCR1A\_match\_CTC4} = \frac{system\_clock}{(1 + OCR1A)\cdot prescaler} \]](https://wolles-elektronikkiste.de/wp-content/ql-cache/quicklatex.com-2761ce17c1f2fb8ba0a8031a9e9ebe0c_l3.png "Rendered by QuickLaTeX.com")
Um eine bestimmte Interruptfrequenz (fdesired) bei vorgegebenem Systemtakt zu berechnen, löst ihr die Gleichung nach OCR1A auf.
![\[ OCR1A = \frac{system\_clock}{prescaler\cdot f_{desired}}-1 \]](https://wolles-elektronikkiste.de/wp-content/ql-cache/quicklatex.com-9534fb54175120ea5b16de61011423f5_l3.png "Rendered by QuickLaTeX.com")
Nur leider haben wir noch eine zweite Unbekannte, nämlich prescaler. Den Prescaler bestimmt ihr zuerst. Er muss so gewählt werden, dass OCR1A kleiner oder gleich 65535 ist. Entweder ihr probiert einfach ein wenig herum oder ihr nutzt zur Berechnung die folgende Formel:
![\[ prescaler \geq \frac{system\_clock}{65536\cdot f_{desired}} \]](https://wolles-elektronikkiste.de/wp-content/ql-cache/quicklatex.com-9ab9ada13a6088959c69591ae9db0067_l3.png "Rendered by QuickLaTeX.com")
Rechnet die rechte Seite aus und dann wählt ihr den nächstgrößeren, verfügbaren Prescaler.
Für den CTC Modus 12 müsst ihr lediglich OCR1A durch ICR1 ersetzen.
Interruptfrequenz im Normal Mode (0)
Wie schon erwähnt, ist 65535 das Top für den Timer1 im Normal Mode. Hier könnt ihr die Überlauffrequenz beeinflussen, indem ihr einen Startwert counter_start vorgebt. Die Berechnungen dazu sind:
![\[ f_{desired\_Normal\_Mode} = \frac{system\_clock}{(65536-counter\_start)\cdot prescaler} \]](https://wolles-elektronikkiste.de/wp-content/ql-cache/quicklatex.com-cefcdac06c6fa3308801c4ee0050e529_l3.png "Rendered by QuickLaTeX.com")
![\[ counter\_start = 65536 - \frac{system\_clock}{prescaler\cdot f_{desired}} \]](https://wolles-elektronikkiste.de/wp-content/ql-cache/quicklatex.com-b38e29bb80b0dc3a4f0cce736a7590a1_l3.png "Rendered by QuickLaTeX.com")
Praktische Beispiele
Timer Interrupts im CTC Mode
Geschafft – jetzt kommt die Praxis. Zum „Aufwärmen“ erzeugen wir im CTC Modus alle zwei Sekunden einen Interrupt (fdesired = 0.5). Den Interrupt nutzen wir, um eine LED an Pin 7 zu toggeln, also je nach Zustand an- oder auszuschalten. Bei 16 MHz ist der einzig mögliche Prescaler 1024. OCR1A ist 31249. Der Interruptvektor ist TIMER1_COMPA_vect.
void setup(){
TCCR1A = 0x00; // OC2A and OC2B disconnected; Wave Form Generator: Normal Mode
TCCR1B = (1<<WGM12) | (1<<CS12) |(1<<CS10); // CTC-Mode 4, prescaler = 1024;
TIMSK1 = (1<<OCIE1A); // interrupt on OCR1A match
OCR1A = 31249;
DDRD |= (1<<PD7); // pinMode(7, OUTPUT);
}
void loop() {}
ISR(TIMER1_COMPA_vect){
PORTD ^= (1<<PD7); // toggle Pin 7
}
Timer Interrupts im Normal Mode
Und nun noch einmal dasselbe im Normal Mode. Für den Startwert errechnen wir 34286. Der Startwert muss nach jedem Interrupt erneut in der ISR gesetzt werden. Diesmal ist TIMER_OVF_vect als Interruptvektor zu wählen.
unsigned int counterStart = 34286;
void setup(){
TCCR1A = 0x00; // OC2A and OC2B disconnected; Wave Form Generator: Normal Mode
TCCR1B = (1<<CS12) |(1<<CS10); // prescaler = 1024;
TIMSK1 = (1<<TOIE1); // interrupt when TCNT1 is overflowed
TCNT1 = counterStart;
DDRD |= (1<<PD7);
}
void loop() {
// do something else
}
ISR(TIMER1_OVF_vect){
TCNT1 = counterStart;
PORTD ^= (1<<PD7);
}
Mehrere Timer1 Interrupts nutzen
Im nächsten Beispiel nutzen wir den Compare Match A, den Compare Match B und den Overflow Interrupt. Damit werden wir eine LED im 2-Sekundentakt toggeln, eine weitere im 1-Sekundentakt und schließlich noch eine Dritte im 2⁄3 Sekundentakt.
Wir nehmen den letzten Sketch als Basis und haben damit den 2-Sekundentakt abgedeckt. Die zweite LED toggeln wir auf der Hälfte des Weges zwischen dem Startwert (34286) und Top+1 (65536). Als Interrupt nutzen wir den Compare Match B, d. h. OCR1B ist 49911. Zusätzlich toggeln wir die zweite LED bei TOP.
Für LED Nr. 3 teilen wir die Strecke Start → Top+1 in drei Stücke. Einmal toggeln wir wieder bei TOP, bräuchten also noch zwei Interrupts, haben aber nur noch den Compare Match A. Dieses Problem lösen wir, indem wir den Wert von OCR1A nach jedem Compare Match A Interrupt neu zuweisen.
So sieht das schematisch aus:
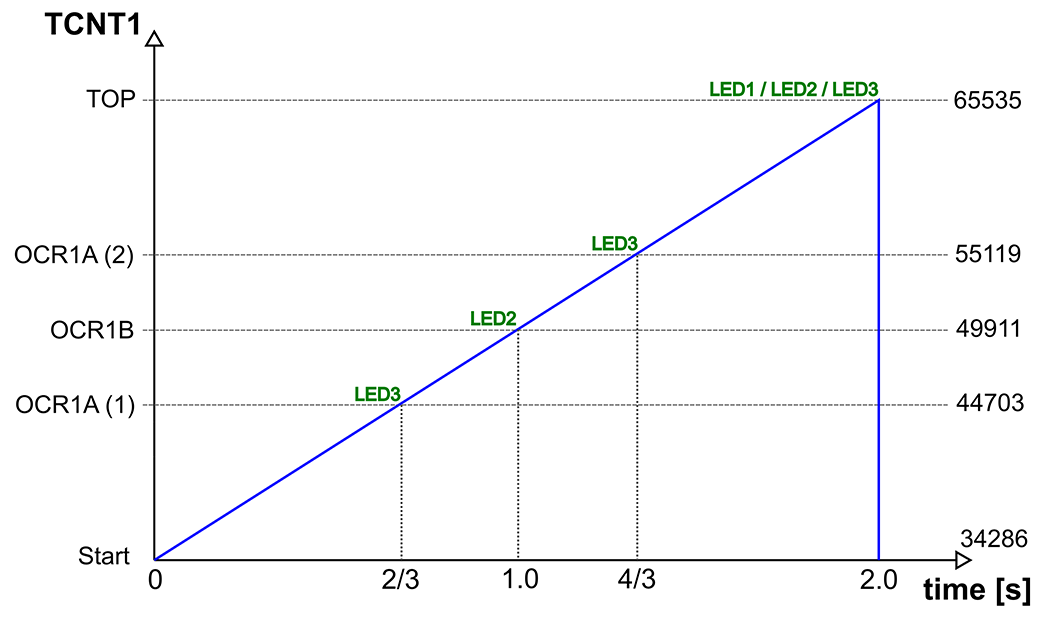
Das Schema ist insofern irreführend, als der Eindruck entsteht, dass mit dem Erreichen von TOP (65535) zwei Sekunden vergangen sind. Das ist aber nicht richtig, denn erst beim Umspringen auf 0 sind die zwei Sekunden vorbei. Und dies ist auch der Grund, weswegen man den Startwert von 65536 und nicht von 65535 abziehen muss, um auf die Zahl der Schritte zu kommen. Das wird klarer, wenn man die Schritte als Treppenstufen darstellt. Wäre der Startwert 65533, wären es drei ganze Schritte bis zum Überlauf:

Mit 5, 6 und 7 (bzw. PD5, PD6 und PD7) als LED Pins sieht der Sketch dann folgendermaßen aus:
unsigned int counterStart = 34286;
void setup(){
TCCR1A = 0x00; // OC2A and OC2B disconnected; Wave Form Generator: Normal Mode
TCCR1B = (1<<CS12)|(1<<CS10); // prescaler = 1024;
OCR1A = 44703;
OCR1B = 49911;
TIMSK1 = (1<<OCIE1B) | (1<<OCIE1A) | (1<<TOIE1); // interrupt when TCNT1 is overflowed and on commpare matches
TCNT1 = counterStart;
DDRD |= (1<<PD7) | (1<<PD6) | (1<<PD5);
}
void loop() {}
ISR(TIMER1_COMPA_vect){
PORTD ^= (1<<PD5);
if(OCR1A==44703){
OCR1A = 55119;
}
else
OCR1A = 44703;
}
ISR(TIMER1_COMPB_vect){
PORTD ^= (1<<PD6);
}
ISR(TIMER1_OVF_vect){
TCNT1 = counterStart;
PORTD ^= (1<<PD7) | (1<<PD6) | (1<<PD5);
}
Wenn es nur darum geht, Pins zu toggeln, dann gibt es einen wesentlich einfacheren Weg, und zwar über OC1A und OC1B (Timer1 Output Compare Match A/B Output). Diese Ausgänge lassen sich automatisch bei einem Compare Match toggeln, und zwar ohne, dass ihr dafür jedes Mal eine ISR aufrufen müsst. Damit befinden wir uns auf halbem Wege zu PWM.
Arduino Web Timers nutzen
Ihr habt keine Lust, immer wieder die richtigen Bits aus den Tabellen der Datenblätter herauszusuchen? Dann empfehle ich das Tool Arduino Web Timers. Ihr klickt einfach nur an, was ihr haben wollt und stellt die gewünschte Frequenz über einen Schieber ein. Der Code wird automatisch erstellt.

Arduino Web Timers funktioniert nicht nur mit dem ATmega328P, sondern auch mit dem LGT8F328P.
AVR Timer Bibliothek TimerOne
Wer es ganz bequem haben möchte, könnte die Bibliothek TimerOne nutzen. Sie ist mit AVR-MCUs bzw. darauf basierenden Boards und mit dem LGT8F328P kompatibel. Die Bibliothek kann über die Bibliotheksverwaltung der Arduino IDE installiert werden.
Hier ein einfaches Beispiel, das selbsterklärend sein sollte:
#include <TimerOne.h>
const int ledPin = 5;
void setup(void) {
pinMode(ledPin, OUTPUT);
Timer1.initialize(500000); // Time in µs
Timer1.attachInterrupt(blinkLED);
Serial.begin(9600);
}
void blinkLED(void) {
digitalWrite(ledPin,!digitalRead(ledPin));
}
void loop() {
// delay(2000); // will not delay the blinking
}
Timer Interrupts mit dem ATtiny85 / ATtiny45 / ATtiny25
Als Beispiel für einen weiteren AVR-Mikrocontroller nehme ich den ATtiny85 bzw. ATtiny45 bzw. ATtiny25. Diese MCUs besitzen zwei 8-Bit Timer, nämlich Timer0 und Timer1.
Wieder soll ein Pin mithilfe des Timer1 im 2-Sekundentakt toggeln. Die ATtinys dieser Reihe bieten zwar einen großen, maximalen Prescaler von 16384, jedoch ist die minimale Timer-Überlauffrequenz durch die 8 Bit bei 8 MHz auf ~1.9 Hz beschränkt. Wir behelfen uns mit einem Zähler, den wir bei jedem Überlauf inkrementieren.
Ich will den Beitrag nicht zu lang werden lassen. Deswegen werde ich nicht alle Details durchgehen, so wie ich das beim ATmega328P getan habe. Schaut am besten in das Datenblatt der ATtinyx5 Reihe. Dort findet ihr alle Register und Bits zum Timer1 in Kapitel 12.3.
Normal Mode
So sieht der Sketch für den Normal Mode aus:
volatile int isrCounter = 0;
const byte counterStart = 12; // at 8 MHz, overflow frequency is: ~2.0012 Hz
void setup(){
TCCR1 = (1<<CS13) | (1<<CS12) | (1<<CS11) | (1<<CS10); // Normal Mode, prescaler 16384
TIMSK = (1<<TOV1); // interrupt on TCNT1 overflow
DDRB |= (1<<PB4); // pinMode(4, OUTPUT);
}
void loop() {}
ISR(TIMER1_OVF_vect){
isrCounter++;
TCNT1 = counterStart;
if(isrCounter == 4){ // to achieve 0.5 Hz
PORTB ^= (1<<PB4); // toggle Pin 4
isrCounter = 0;
}
}
Da die gewünschten 0.5 Hertz nicht darstellbar sind, habe ich erst einmal ausgerechnet, wie viele Schritte der Timer Counter bei 8 MHz und einem Prescaler von 16384 theoretisch zählen müsste. Das sind 8000000 / (16384 * 0.5) = ca. 976. Die maximale Schrittzahl ist aber 256. 2 Hertz würden hingegen passen (~244 Schritte). Damit ist der Timer Counter Startwert 12 und die Überlauffrequenz ~2.0012 Hertz.
CTC Mode
Der Vollständigkeit halber hier noch der entsprechende Sketch im CTC Modus. Das funktioniert anders als beim ATmega328P. Der Interrupt wird bei einem OCR1A Compare Match ausgelöst. Bei einem Compare Match mit OCR1C wird der Counter zurückgesetzt. Dadurch, dass wir OCR1A und OCR1C denselben Wert zuweisen, kreieren wir im Prinzip ein PWM Signal mit einem Duty-Cycle von 100 %.
volatile int isrCounter = 0;
void setup(){
/* CTC-Mode -> TCNT1 set to 0 at compare match with OCR1C;
* PWM1A -> enables PWM mode based on comparator OCR1A in Timer/Counter1 and
* the counter value is reset to 0 in the CPU clock cycle after a
* compare match with OCR1C register value
* prescaler = 16384;
*/
TCCR1 = (1<<CTC1) | (1<<PWM1A) | (1<<CS13) | (1<<CS12) | (1<<CS11) | (1<<CS10);
TIMSK = (1<<OCIE1A); // interrupt on OCR1A match
OCR1A = 243; // at 8 MHz, compare match frequency is: ~2.0012 Hz
OCR1C = 243;
DDRB |= (1<<PB4); // pinMode(4, OUTPUT);
}
void loop() {}
ISR(TIMER1_COMPA_vect){
isrCounter++;
if(isrCounter == 4){ // to achieve 0.5 Hz
PORTB ^= (1<<PB4); // toggle Pin 4
isrCounter = 0;
}
}
Timer Interrupts mit dem ESP32
Nun kommen wir zu den Timer Interrupts mit dem ESP32. Die gute Nachricht zuerst: Im Vergleich zu den AVR basierten Arduinos ist das Einrichten wesentlich einfacher.
Der ESP32 besitzt vier 64-Bit Timer (Ausnahme: der ESP32-C3 hat zwei) und für jeden von ihnen könnt ihr einen Interrupt einrichten. Der Timer zählt in der Systemfrequenz (also normalerweise 80 MHz) und kann durch einen Prescaler verlangsamt werden.
Einen einzigen Timer Interrupt einrichten
Hier ein einfacher Beispielsketch:
const int ledPin = 16;
hw_timer_t * myTimer = NULL;
void IRAM_ATTR onTimer(){ // timer interrupt ISR
digitalWrite(ledPin, !digitalRead(ledPin));
}
void setup() {
pinMode(ledPin, OUTPUT);
uint64_t alarmLimit = 1500000;
myTimer = timerBegin(1000000); // timer frequency
timerAttachInterrupt(myTimer, &onTimer);
timerAlarm(myTimer, alarmLimit, true, 0);
}
void loop() {}
Den Sketch habe ich übrigens mit verschiedenen ESP32 Development Boards getestet, und zwar mit einem ESP32-WROOM-32, einem ESP32C3, einem ESP32S3 und dem ESP32S Dev Kit C.
Das ESP32 Boardpaket ab Version 3.0.0 ist bezüglich der Timer zu vorherigen Versionen nicht abwärtskompatibel. Dieser und der folgende Sketch sind an die neuere Version angepasst.
Erläuterungen zu esp32_1_timer.ino
hw_timer_t * myTimer = NULL;erzeugt die Variabletimervom Typ hw_timer_t (Hardware Timer) als Zeiger.- Mit
timer = timerBegin(1000000);bekommttimerseine Bedeutung. Der Parameter ist die Frequenz, mit der der Timer zählt. Nach meinen Erkenntnissen darf die Frequenz nicht größer als 40 MHz und nicht kleiner als 1250 Hertz sein. timerAttachInterrupt: Ordnet dem Timer eine ISR zu.timerAlarm: Definiert die Interruptbedingung, sprich den Zählerstand, bei dem der Interrupt ausgelöst wird. Ihr übergebt dem Timer vier Parameter:- Den Timer.
- Das Alarmlimit. Alarmlimit / Timerfrequenz ergibt die Interruptfrequenz.
- Das
truebedeutet hier, dass der Timer Alarm nach Erreichen des Limits neu gestartet wird (Auto-Reload). - Der vierte Parameter ist die Anzahl der Wiederholungen (0 = unendlich). Der Wert hat nur einen Effekt, wenn Auto-Reload false ist.
Vier Timer Interrupts einrichten
Im Prinzip ist es ganz einfach, vier Timer Interrupts einzurichten. Ihr müsst lediglich für jeden Timer eine eigene Variable, eine eigene ISR und die individuellen Interruptbedingungen festlegen. Um viel Schreibarbeit zu vermeiden, können wir Arrays verwenden. Das ist eigentlich auch einfach, aber da vielleicht nicht jeder weiß, wie man ein Array von Funktionen anlegt, gibt es hier noch einen Sketch dazu:
const int ledPin[] = {16, 17, 18, 19};
hw_timer_t* myTimer[4] = {NULL};
void IRAM_ATTR onTimer0(){
digitalWrite(ledPin[0], !digitalRead(ledPin[0]));
}
void IRAM_ATTR onTimer1(){
digitalWrite(ledPin[1], !digitalRead(ledPin[1]));
}
void IRAM_ATTR onTimer2(){
digitalWrite(ledPin[2], !digitalRead(ledPin[2]));
}
void IRAM_ATTR onTimer3(){
digitalWrite(ledPin[3], !digitalRead(ledPin[3]));
}
void (*onTimer[4])(void) = {onTimer0, onTimer1, onTimer2, onTimer3}; // array of functions
void setup() {
unsigned int alarmLimit[] = {500000, 750000, 1250000, 1500000}; // int size is 4 bytes n the ESP32!
for(int i=0; i<4; i++){
pinMode(ledPin[i], OUTPUT);
myTimer[i] = timerBegin(1000000);
timerAttachInterrupt(myTimer[i], onTimer[i]);
timerAlarm(myTimer[i], alarmLimit[i], true, 0);
}
}
void loop() {}
Weitere nützliche Funktionen für die Timer des ESP32 findet ihr hier in der Arduino ESP32 API – Dokumentation.
Timer Interrupts mit dem ESP8266
Der ESP8266 besitzt zwei Timer, nämlich Timer0 und Timer1, wobei der Timer0 für WiFi benötigt wird und deswegen nicht zur freien Verfügung steht. Die Einrichtung eines Timer Interrupts auf dem ESP8266 ist wieder etwas weniger komfortabel, sofern man keine Bibliothek benutzt.
Timer Interrupts ohne Bibliothek
Hier erst einmal ein Beispiel für einen Timer Interrupt ohne Einsatz einer Bibliothek (getestet auf dem Wemos D1 mini Board).
const int ledPin = D2;
void IRAM_ATTR timer1ISR() {
digitalWrite(ledPin, !digitalRead(ledPin));
}
void setup(){
pinMode(D2, OUTPUT);
timer1_attachInterrupt(timer1ISR);
/* Prescalers:
TIM_DIV1 80MHz => 80 ticks/µs => Max: (2^23 / 80) µs = ~0.105s
TIM_DIV16 5MHz => 5 ticks/µs => Max: (2^23 / 5) µs = ~1.678s
TIM_DIV256 0.3125MHz => 0.3125 ticks/µs => Max: (2^23 / 0,3125) µs = ~26.8s
Interrupt TYPE:
TIM_EDGE no other choice here
Repeat?:
TIM_SINGLE 0 => one time interrupt, you need another timer1_write(ticks); to restart
TIM_LOOP 1 => regular interrupt
*/
timer1_enable(TIM_DIV16, TIM_EDGE, TIM_LOOP);
timer1_write(2500000); // 2500000 / 5 ticks/µs => 0.5s interval
}
void loop(){}
Erläuterungen zu esp8266_timer.ino
Der Timer1 Counter hat eine Größe von 23 Bit. Das klingt viel, aber bei 80 MHz ist läuft er ca. alle 0.105 Sekunden über. Mit den Prescalern (TIM_DIV) 16 und 256 lässt sich diese Zeitspanne auf ~1.678 bzw. ~26.8 Sekunden verlängern.
timer1_attachInterrupt()definiert die ISR für den Interrupt.timer1_detachInterrupt()deaktiviert den Interrupt.
- Mit
timer1_enable()legt ihr den Prescaler fest und ob der Timer einmalig oder dauerhaft aktiviert werden soll.timer1_disable()deaktiviert den Timer1.
timer1_write()startet den Countdown bei dem übergebenen Zählerstand. Der Counter zählt also rückwärts und löst den Interrupt bei 0 aus.- Mit
timer1_read()könnt ihr den Timer1 Counter auslesen.
- Mit
Der timer1_write() zu übergebende Vorgabewert „Timerpreload“ ergibt sich aus dem Systemtakt, dem Prescaler „presc“ und der Wunschfrequenz „fdesired“ bzw. der Wunschperiode „perioddesired“ :
![\[ \text{Timer}_{\text{preload}} = \frac{80000000}{ \text{presc} \cdot \text{f}_{\text{desired}} } = \frac{80000000}{ \text{presc} } \cdot \text{period}_{\text{desired}} \]](https://wolles-elektronikkiste.de/wp-content/ql-cache/quicklatex.com-fc962dfdb45b8fe733b24c3d7aec7d4a_l3.png "Rendered by QuickLaTeX.com")
Timer Interrupts mit Ticker Bibliothek
Wer es einfacher haben möchte, sollte die Ticker Bibliothek verwenden. Diese müsst ihr nicht gesondert installieren, da sie Teil des Arduino ESP8266 Paketes ist. Ich denke, das Beispiel ist selbsterklärend:
#include <Ticker.h>
Ticker blinker;
const int ledPin = 2;
void blinkLED(){
digitalWrite(ledPin, !(digitalRead(ledPin)));
}
void setup(){
pinMode(ledPin, OUTPUT);
//Initialize Ticker every 0.5s
blinker.attach(0.5, blinkLED); // use attach_ms for milliseconds
}
void loop() {}
MCU-übergreifende Timer-Bibliotheken
Aber gibt es nicht doch MCU-übergreifende Bibliotheken für Timer Interrupts? Leider nein, zumindest nicht, dass ich wüsste. Was es aber gibt, sind MCU-übergreifende Timer-Bibliotheken, die auf Basis von millis() funktionieren, wie z. B. arduino-timer oder TickTwo. Ihr könnt sie über den Bibliotheksmanager der Arduino IDE installieren.
Der Nachteil dieser Lösungen ist, dass ihr aktiv abfragen müsst, ob die definierte Zeitspanne abgelaufen ist. Wenn ihr die Delays in den Hauptschleifen der folgenden Beispielsketche entkommentiert, werdet ihr feststellen, dass die Blinkfrequenz entsprechend sinkt.
arduino-timer
Hier der Beispielsketch für arduino-timer:
#include <arduino-timer.h>
const int ledPin = 5;
auto timer = timer_create_default();
bool blinkLED(void *) {
digitalWrite(ledPin, !digitalRead(ledPin)); // toggle the LED
return true; // in case you want to stop the timer choose false
}
void setup() {
pinMode(ledPin, OUTPUT); // set LED pin to OUTPUT
timer.every(500, blinkLED);
}
void loop() {
timer.tick();
// delay(2000); // will delay the blinking
}
TickTwo
Und hier der Beipielsketch für TickTwo:
#include "TickTwo.h"
const int ledPin = 5;
void blinkLED() {
digitalWrite(ledPin, !digitalRead(ledPin));
}
TickTwo timer(blinkLED, 500);
void setup() {
pinMode(ledPin, OUTPUT);
timer.start();
}
void loop() {
timer.update();
// delay(2000); // will delay the blinking
}
Anhang – ICP1 als externen Interruptpin nutzen
Zum Schluss komme ich noch einmal auf den Timer1 des ATmega328P zurück. Und zwar wollte ich zeigen, wie ihr den Input Capture Interrupt nutzen könnt, sodass sich ICP1 (PB0/Pin 8) wie ein externer Interruptpin verhält.
const int ledPin = 13;
const int icp1Pin = 8;
volatile bool event = false;
ISR(TIMER1_CAPT_vect){
event = true;
}
void setup() {
pinMode(icp1Pin, INPUT);
pinMode(ledPin, OUTPUT);
// TCCR1B = (1<<ICES1); // rising edge
TCCR1B = (1<<ICNC1) | (1<<ICES1); // with noise cancelling
TIMSK1 = (1<<ICIE1);
}
void loop() {
if(event){
digitalWrite(ledPin, HIGH);
delay(500);
digitalWrite(ledPin, LOW);
event = false;
}
}
Die folgenden Bits sind hier relevant:
- ICES1: Ist das Bit gesetzt, wird der Interrupt bei einer steigenden Flanke ausgelöst.
- ICNC1: Setzt ihr dieses Bit, wird der Interrupt nur dann ausgelöst, wenn ICP1 über vier Takte hinweg die Interruptbedingung erfülllt (NC = noise cancelling).
- ICIE1: aktiviert den Input Capture Interrupt.
Danksagung
Mein Beitragsbild habe ich aus verschiedenen Komponenten zusammengesetzt. Die Time-Out Geste habe ich Gerd Altmann zu verdanken, die Sanduhr stammt von Felipe und das Hintergrundbild (Arduino UNO) von federicoag, alles gefunden auf Pixabay.
Danke für die Anleitung.
Bei den ESP32-Kisten scheint sich ja einiges getan zu haben beim Update der ESP32-Arduino-Umgebung.
Man ist etwas aufgeschmissen, da sich Anleitungen für die alte Version tummeln, und man nie beim Link erkennen kann, um welche Version ESP32-Bibliothek es sich handelt.
Ich habe den Timer nun am Laufen mit der aktuellen ESP32-Version 3.3.2.. Bei den alten Anleitungen gibt es weitere Funktionen wie „timerAlarmEnable“ und halt auch disable, die gibt es bei der neuen Version nicht mehr.
Wie kann man denn einen Interrupt nachträglich außer Kraft setzen und später wieder aktivieren? Oder muss ich hier was eigenes basteln (also z.B. ein Flag in der Interrupt-Routine auswerten?
Hallo Hartmut, ja, die teilweise nicht-Kompatibilität der ESP32 Boardpakete bzw. der zugrundeliegenden ESP32-IDF Versionen ist ein Ärgernis. Da niemand damit im Vorfeld gerechnet hat, hat auch kaum jemand in Veröffentlichungen die Notwendigkeit gesehen, bei Beispielen die Boardpaketversion zu erwähnen.
Zur eigentlichen Frage: im Beitrag gibt es einen Link zu den Timerfunktionen der jeweils neuesten ESP32 IDF:
https://espressif-docs.readthedocs-hosted.com/projects/arduino-esp32/en/latest/api/timer.html
Dort solltest du fündig werden. In Frage kämen timerEnd(), timerStop() oder timerDetachInterrupt().
VG, Wolfgang
Hallo Wolfgang,
erst mal vielen Dank, für den tollen und absolut hilfreichen Webauftritt…
Ich beginne gerade damit mich mit den Interrupts der AVR-Reihe zu beschäftigen und ich versuche das ganze über die Arduino IDE abzuturnen.
Meine Frage:
Für die Benennung der Interrupt Vektoren, die dann im Loop aufgerufen werden habe ich bislang noch keine offizielle Quelle gefunden. Im Beispiel für den ATTiny85 wird die ISR im Loop über „TIMER1_OVF_vect“ aufgerufen. Für den ATtiny85 habe ich auf habe ich allerdings nur „TIM1_OVF_vect“ als Vector Aufruf gefunden (https://www.nongnu.org/avr-libc/user-manual/group__avr__interrupts.html).
Kannst du mir sagen, ob es eine bestimmte Nomenklatur gibt, anhand derer man festmachen kann, wie die Vectornamen korrekt als Aufruf gestaltet werden?
Auch im Datenblatt kann ich die Vectornamen zwar finden – dort sind sie jedoch ohne „_“ und den Anhang „vect“ beschrieben.
Vielleicht hast du einen Tipp – vielen Dank im Voraus…
Chris
Hallo Chris,
auf dieses Problem bin ich auch schon gestoßen. In 90 % der Fälle liegt man richtig, wenn man sich das Datenblatt des Mikrocontrollers nimmt, zum Kapitel Interrupts geht und dort den Namen der Interruptquelle heraussucht, also zum Beispiel hier in Kapitel 9:
https://ww1.microchip.com/downloads/en/devicedoc/atmel-2586-avr-8-bit-microcontroller-attiny25-attiny45-attiny85_datasheet.pdf
Da lautet die Quelle, um bei deinem Beispiel zu bleiben, TIMER1_OVF. Da hängst du dann ein „_vect“ dran. Aber wie das ist nicht ganz verlässlich. Sicherer, aber schwerer lesbar, ist es, die Vektornummer zu nehmen, also anstelle TIMER1_OVF_vect wäre das dann _VECTOR(4).
Man kann die Interruptvektornamen auch in den Tiefen der Arduino-Dateien finden. Bei mir liegen die relevanten Dateien in diesem Verzeichnis:
C:\Users\Ewald\AppData\Local\Arduino15\packages\arduino\tools\avr-gcc\7.3.0-atmel3.6.1-arduino7\avr\include\avr
Da gibt es dann für den ATiny85 die zuständige Datei iotn85.h. Diese wiederum inkludiert die Datei iotnx5.h für alle x5 ATtinys. Und dort findest du den Eintrag (bei mir Zeile 375-380):
Und siehe da: TIM1_OVF_vect und TIMER1_OVF_vect bedeuten beide _VECTOR(4).
Dein Link ist ausgesprochen hilfreich, den habe ich mir schon unter meine Bookmarkfavoriten gepackt.
VG, Wolfgang
Haben Sie ein bestimmtes #include?
Was sind ihre Headerfiles?
Im Headerfile: „esp32-hal-timer.h“ in meinem PC steht:
struct timer_struct_t;
typedef struct timer_struct_t hw_timer_t;
hw_timer_t *timerBegin(uint32_t frequency);
void timerEnd(hw_timer_t *timer);
void timerStart(hw_timer_t *timer);
void timerStop(hw_timer_t *timer);
void timerRestart(hw_timer_t *timer);
void timerWrite(hw_timer_t *timer, uint64_t val);
Somit ist die Fehleranzeige ok.
Hallo,
vielen Dank für den Kommentar bzw. den Hinweis. Das Problem ist das Update des ESP32 Boardpaketes auf die Versionen 3.x.y bzw. die Änderungen an den zugrundeliegenden ESP-IDF-Versionen. Ich kann die Fehlermeldung nachvollziehen. Versuchsweise bin ich auf die letzte 2er-Version 2.0.17 zurückgegangen, damit funktioniert es nach wie vor.
Es ist nicht der einzige Bruch, der mit dem Update einherging. Nicht-Abwärtskompatibilität gab es beispielsweise auch bei ESP-NOW und die Unterstützung des Hallsensors ist ganz verschwunden. Aber es gibt da noch einiges mehr. Sehr ärgerlich.
Ich werde versuchen, den Code anzupassen, sodass er zu den Boardpaketversionen 3.x.y kompatibel ist. Vielleicht komme ich am Wochenende dazu, ich will aber nichts versprechen.
VG, Wolfgang Ewald
Ich habe den Code jetzt für die Board-Paket-Versionen ab 3.0.0 angepasst.
Danke noch einmal für den Hinweis. Bei über 100 Artikeln kann ich solche Nebenwirkungen von Updates nicht systematisch nachhalten. Gleiches gilt für tote Links u.ä. Da bin ich auf Hinweise von Lesern angewiesen.
VG, Wolfgang Ewald
Ich benutze ESP32 Dev Module und kann keinen Timer auswählen.
Wenn ich ihre Version benutze kommt folgende Fehler:
7 | My_timer = timerBegin(2, 80, true);
error: too many arguments to function ‚hw_timer_t* timerBegin(uint32_t)‘
Bei mir funktioniert nur folgende Sequenz:
hw_timer_t * timer = NULL;
….
timer = timerBegin(1000000);
timerAttachInterrupt(timer, &onTimer); ….
In Internet finde ich Ihre Version.
Wie kann ich Timer 1..4 nutzen?
Hallo Ewald,
ich habe eine kleine Anwendung mit ATtiny45 unter Verwendung des Timers 1 als Taktgenerator. Im CTC Modus toggle ich einen Ausgang mit dem Interruptvektor 09. Das funktioniert grundsätzlich. Ich takte den Timer ohne Prescaler, im Compare-Register C steht 0x3A. Daraus sollten sich am Ausgang ~70kHz ergeben. Die Frequenz am Ausgang liegt aber in der Nähe von 1kHz. Zum Test habe ich den Wert im C-Register auf 0xA reduziert und bekomme damit ca. 5kHz am Ausgang. Ich finde keine ERklärung dafür. Um zu testen, ob das Fuse-Bit für 8MHz CPU-Takt gesetzt ist habe ich mit der Funktion millis() getestet. Ein 10 Hz -Blinker funktioniert noch exakt. Bei 100Hz kommen nur mehr 82Hz heraus. Hast Du eine Idee, woran das liegen könnte?
Vielen Dank im Voraus für Deine Mühe
Franz
Hallo Franz,
eine derartige Reduktion der Frequenz kann ich mir nicht erklären.
Mit diesem Sketch erreiche ich 51 kHz:
void setup(){ TCCR1 = (1<<CTC1 | 1<<CS10); TIMSK = (1<<OCIE1B); OCR1B = 58; DDRB |= (1<<PB4); } void loop() {} ISR (TIMER1_COMPB_vect){ // Interrupt Service Routine TCNT1 = 0; PINB = (1<<PB4); }Du kannst den Sketch ja mal probieren.
Es sind keine 70 kHz, weil Zeit für den Aufruf der Interruptroutine und das Toggeln draufgeht. An 70 kHz drankommen würde man mit PWM. Aber, wie gesagt, warum es bei dir 1 kHz ist, kann ich dir nicht sagen. Auch nicht, warum der 100 Hz Blinker 82 Hz liefert. Du könntest mir deinen Code mal zusenden an: wolfgang.ewald@wolles-elektronikkiste.de.
Viele Grüße, Wolfgang
Hallo Wolfgang,
vielen Dank für deine hervorragende Webseite. Bin restlos begeistert und habe sehr viel dadurch gelehrnt, was ich auf anderem Wege mir nur schwer aneignen konnte. Ich habe moch einige Seiten von dir vor mir aber beabsichtige mir alles anzuschauen.
Viele Grüße
André
Wie immer ein top Artikel!
Es freut mich, dass du das timers web tool gute Nutzung gibst
Danke für die Erstellung des Tools!
Hallo Helmut,
ESP32 ist dabei:
https://wolles-elektronikkiste.de/interrupts-teil-3-timer-interrupts#esp32
Der Teil ist relativ kurz im Vergleich zum großen AVR-Abschnitt, aber eben auch wesentlich unkomplizierter.
Daumen hoch, ich hoffte auf ESP32, es gibt, glaube ich, keine Beschreibung für den ESP32?